

STUDIO
The HS 2018 Robotic Landscapes II studio is the second collaboration between the Chair of Christophe Girot and the Chair of Gramazio Kohler Research.
EXPERTS:
Prof. Dr. Marco Hutter | Institute of Robotics and Intelligent Systems | ETH Zürich | Prof. Paolo Burlando | Chair of Hydrology and Water Resources Management, ETH Zurich; Prof. Peter Molnar | TP at the Chair of Hydrology and Water Resources Management, ETH Zurich; Dr. Brian McArdell | Scientific Staff Member, Swiss Federal Institute for Forest, Snow and Landscape Research WSL; Dominic Jud | Robotic System Lab | PhD Researcher | ETH Zürich; Matthias Bernhard | Digital Building Technologies / ETH Zürich;
ASSISTANTS
Ilmar Hurkxkens, Fujan Fahmi, Benedikt Kowalewski, Jesús Medina, Dr. Ammar Mirjan
STUDENTS
Andrea Calzolar, Rongsheng Chen, Anastasia Filatova, Alex Francheville, Roma Guldimann, Roderic Gônter, Jonas Haldemann, Lip Jiang Lee, Matthew Lee, Elizabeth Levy, Sebastian Meier, Kelly Meng, Sam Mettraux, Stanislaw Modrzyk, Carlo Molteni, Cilgia Salzgeber, Basil Schôck, Gereon Sievi, Yorika Sunada, Dawit Tadesse , Ayako Yamagishi
DISSERTATION
The thesis is part of the interdisciplinary research project ‘Construction Robotics’ supported by the NCCR Digital Fabrication. It is a collaboration between the Chair of Landscape Architecture of Prof. Christophe Girot, The Chair of Architecture and Digital Fabrication of Gramazio and Kohler and the Robotic System Lab of Prof. Marco Hutter at the ETH Zurich. | The Topology of Robotic Landscape Fabrication
Mudslide in Bondo on Friday 25th of August 2017. (Keystone-SDA-ATS)
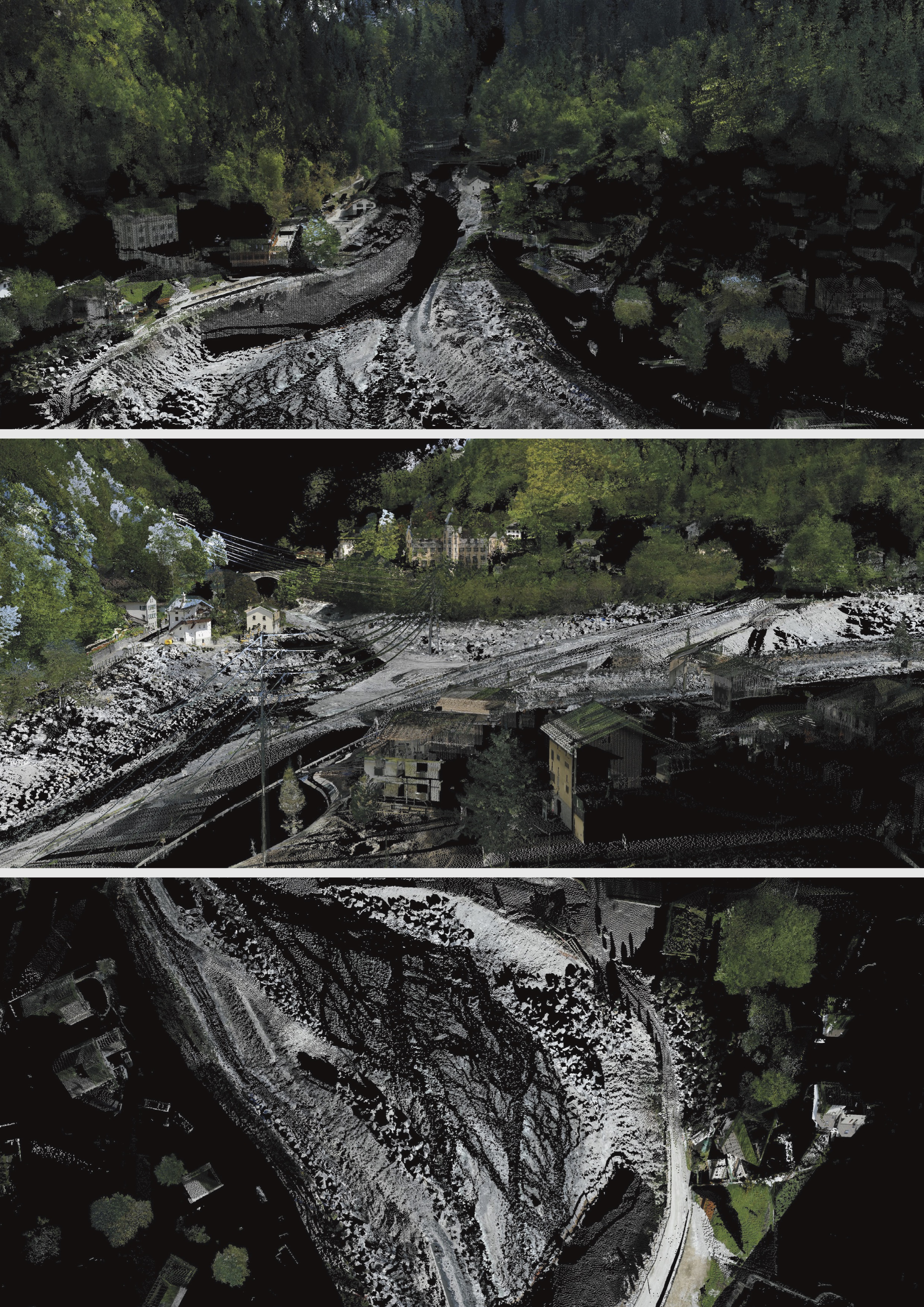
Point Cloud Model of Bondo, August 2018, Chair Girot
Designing a Dynamic Alpine Landscape
The HS 2018 Robotic Landscapes II studio is the second collaboration between the Chair of Christophe Girot and the Chair of Gramazio – Kohler Research. It continues to investigate the potential of on-site robotic construction and grading methods in landscape architecture. Large-scale topographic modeling through the robotic manipulation of soil and rocks will be creatively investigated to produce a resilient landscape project at the landslide site of Bondo in the Grisons.
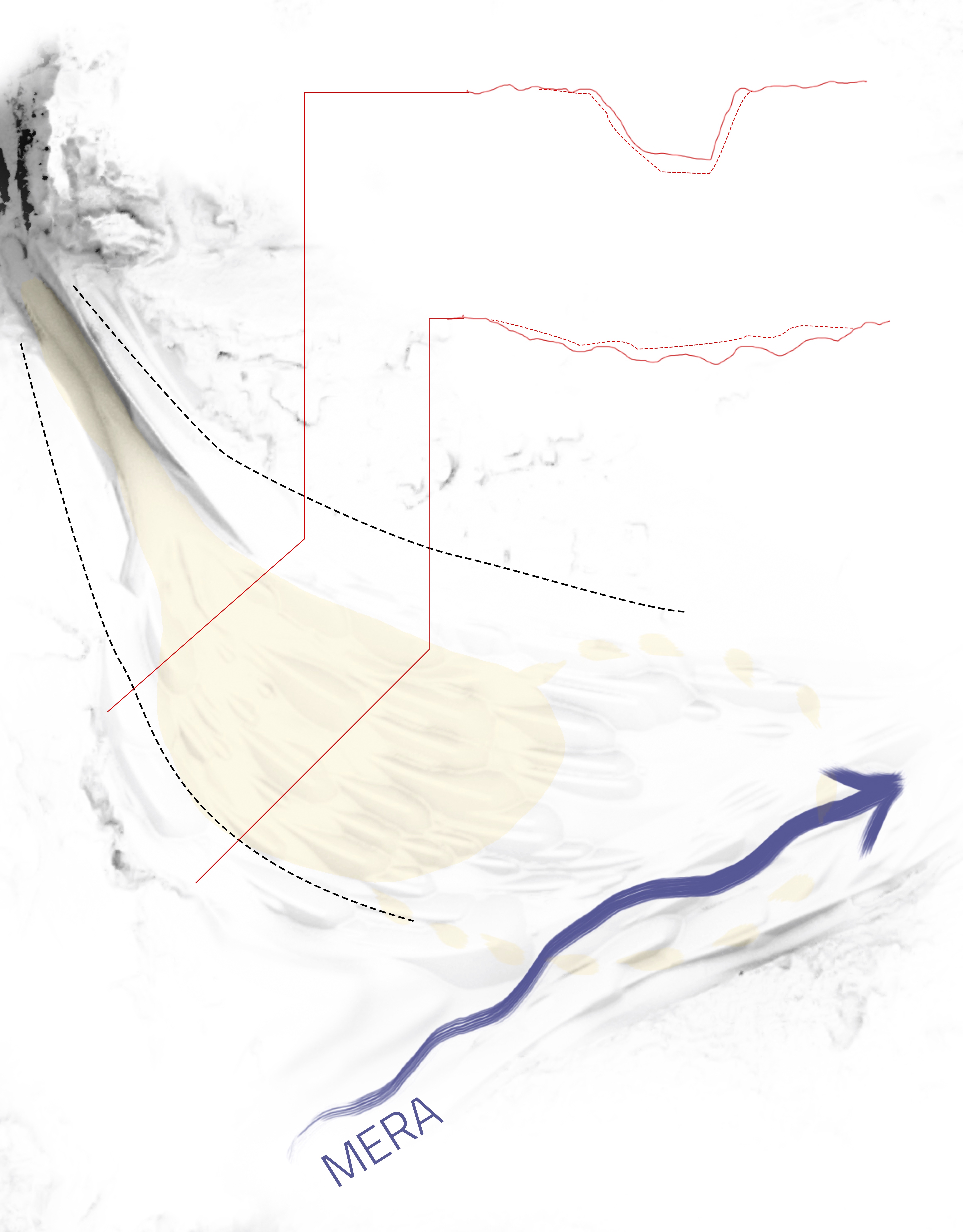
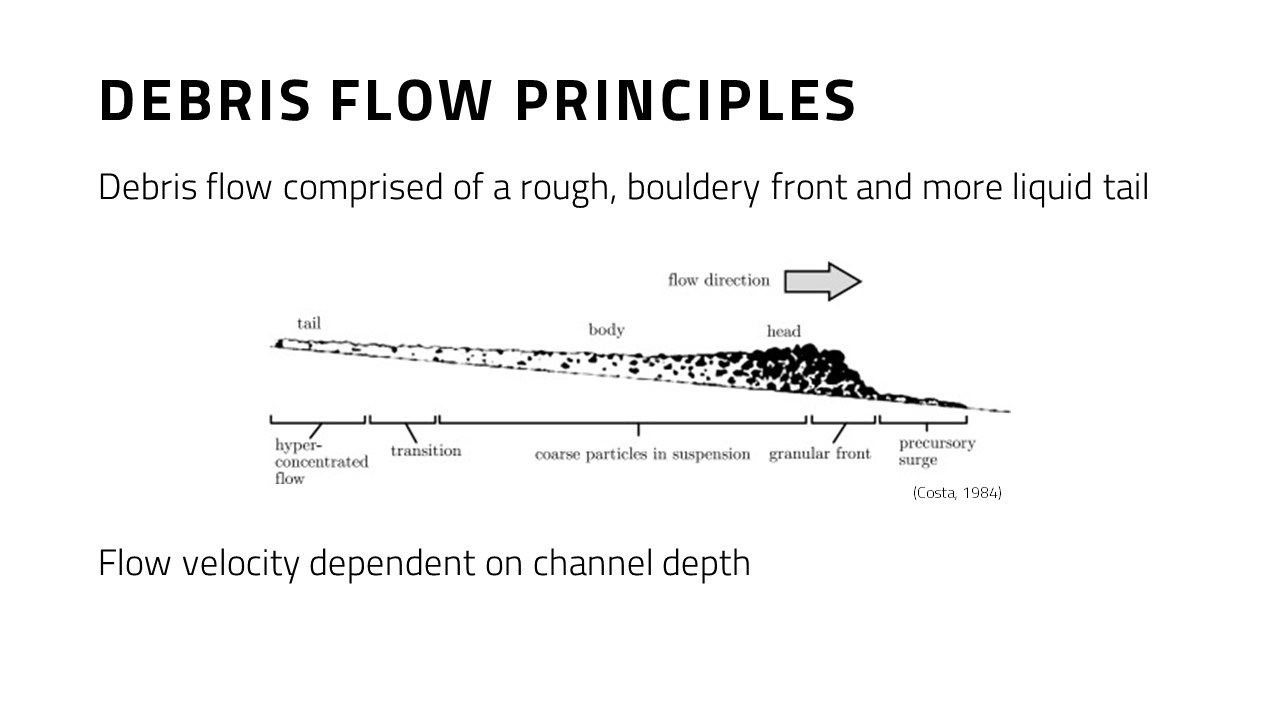
Since 2011, a chain of major tectonic events have deeply affected Val Bondasca since the partial geological collapse of the Piz Cengalo Mountain requiring urgent remedial measures. In August 2017 over three million cubic meters of broken rocks, mud and boulders collapsed, and created one of the largest landslides in Swiss memory. A wall of mud and rocks crashed down on the village of Bondo obstructing the main road, killing people and dividing the village into two now disconnected sites. There still remains 1.5 million cubic meters of landslide rock in an unstable condition still threatening the Bondasca Valley. Heavy rainfall will undoubtedly result in further landslides worsening the precarious situation in Bondo in the coming years. The studio will study possible landscape solutions reshaping the river course and its banks in a more sustainable way.
In response to the challenges posed by the disaster, this studio will ask students to develop creative new topographic solutions using unformed sand, gravel and rock from the landslide through robotic principles and procedural design solutions that can mediate further risks of on-site disruptions.
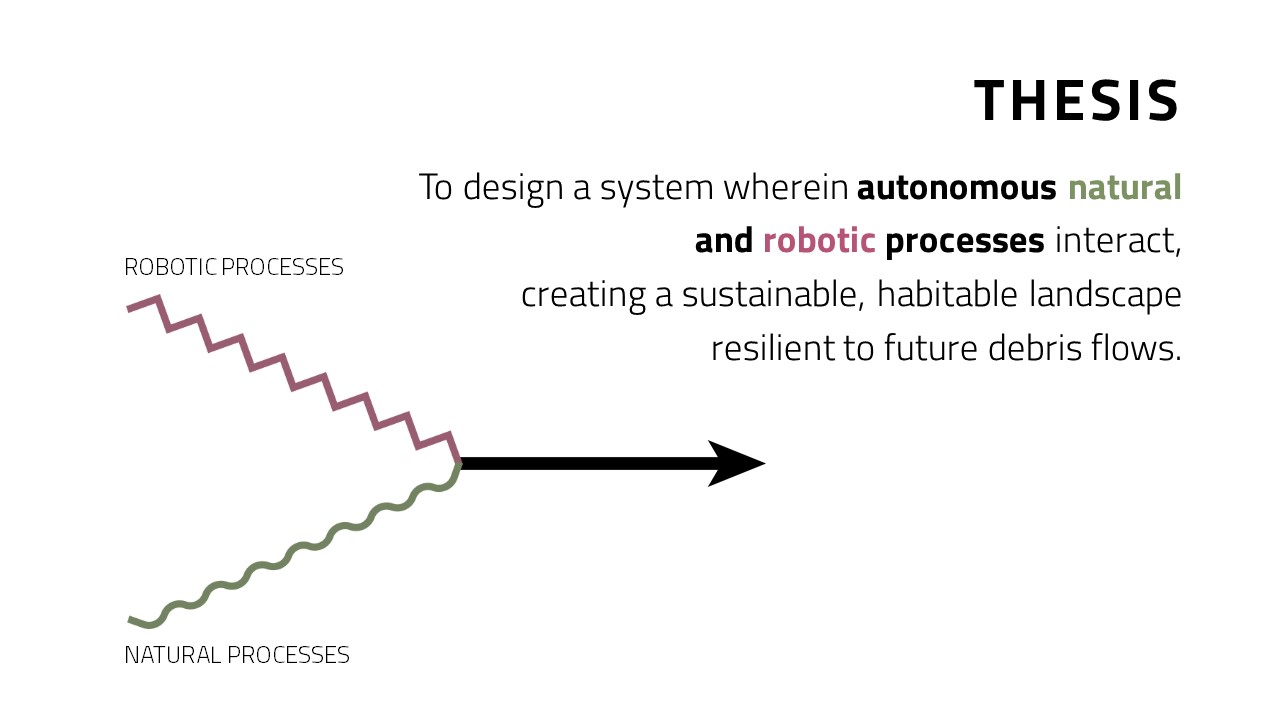
This will be a unique opportunity to re-imagine the making of a landscape project in an alpine setting looking at its potential for reconciliation between natural processes and designed environments. Students will be asked to propose a multifunctional Belvedere embedded in the dynamic landscape of a river, reinventing new forms nature and topographies for Bondo, by applying material from the landslide appropriately to help reconnect both sides of the village that were abruptly separated by the cataclysm.
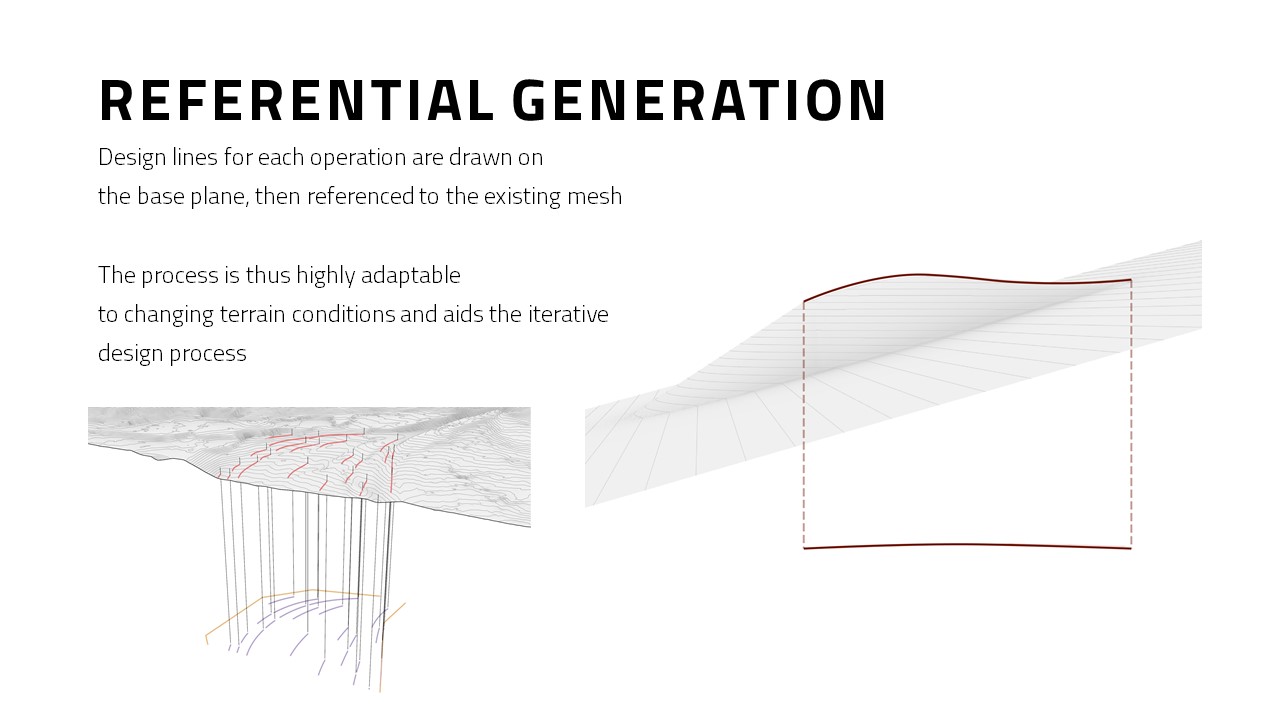
Based on dynamic landscape modeling principles, the studio will use the facilities of the ETH Landscape Modeling and Visualizing Lab (LVML) and the ITA Arch-Tec-Lab to establish a procedural and iterative design approach. There will be workshops in robotic modeling using sand and gravel, 3D landscape modeling, and 3D prototype printing to help conceive 3D landscape models (using Rhino and Grasshopper plugins). A series of lectures, a compulsory weekend on-site visit, as well as critiques and workbooks will help students attain the high landscape design objectives set by this studio.
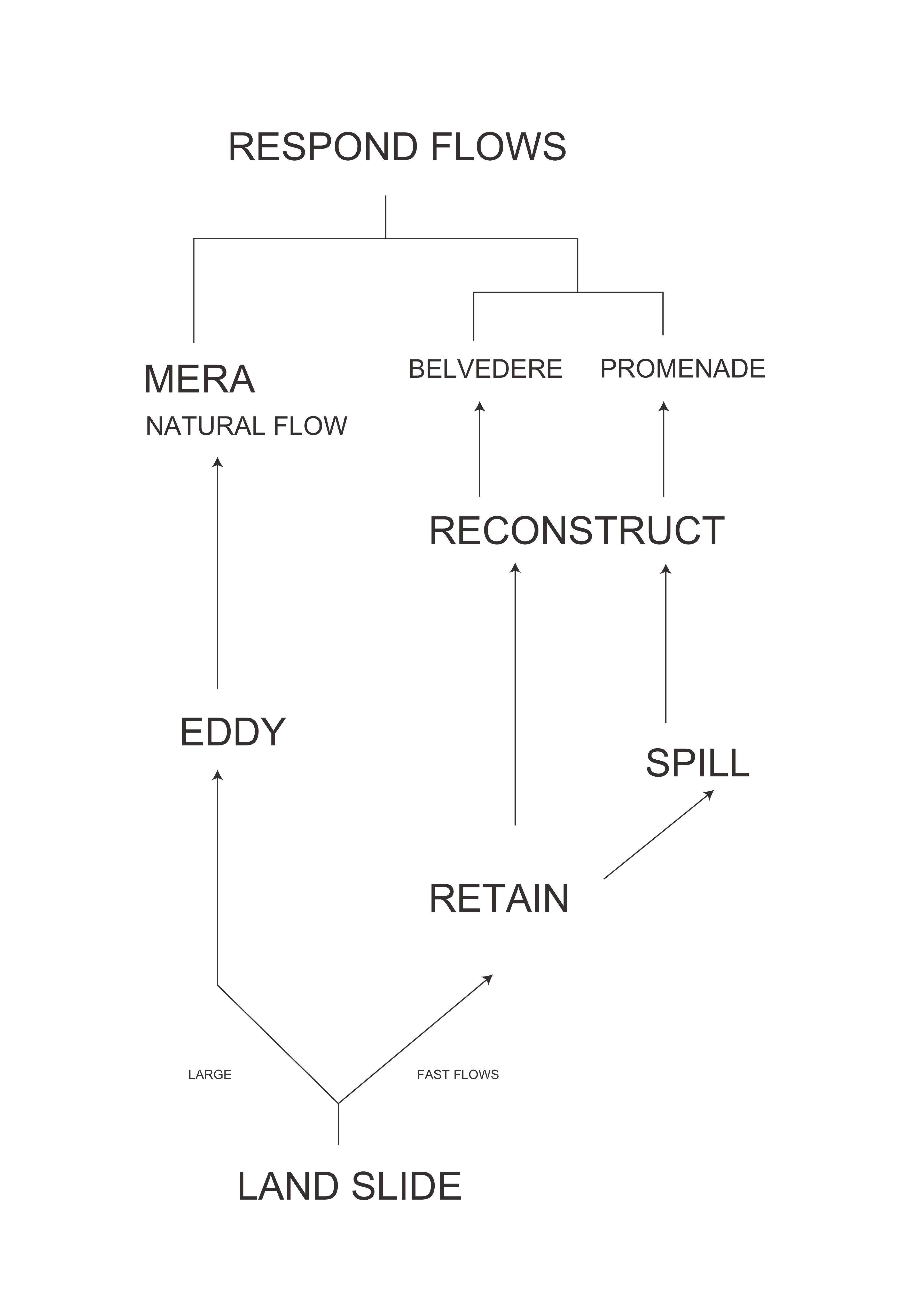
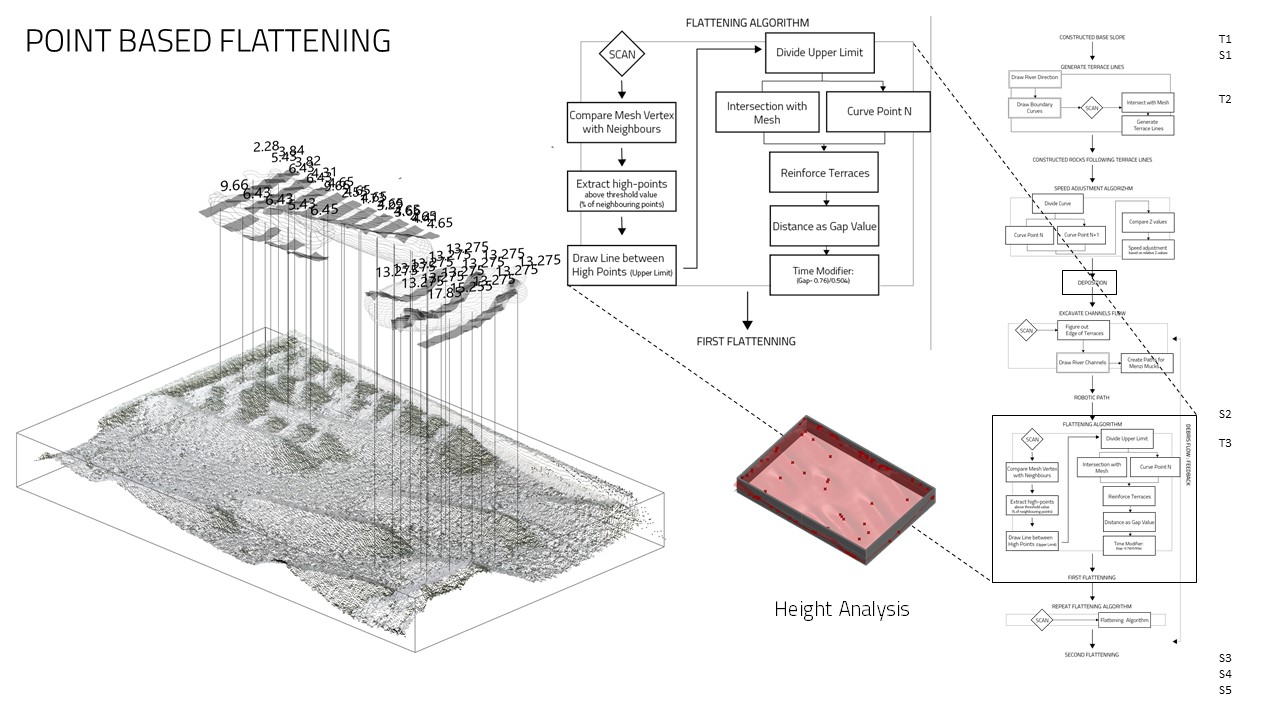
Systematic investigation undertaken over the Design Studio Robotic Landscapes II
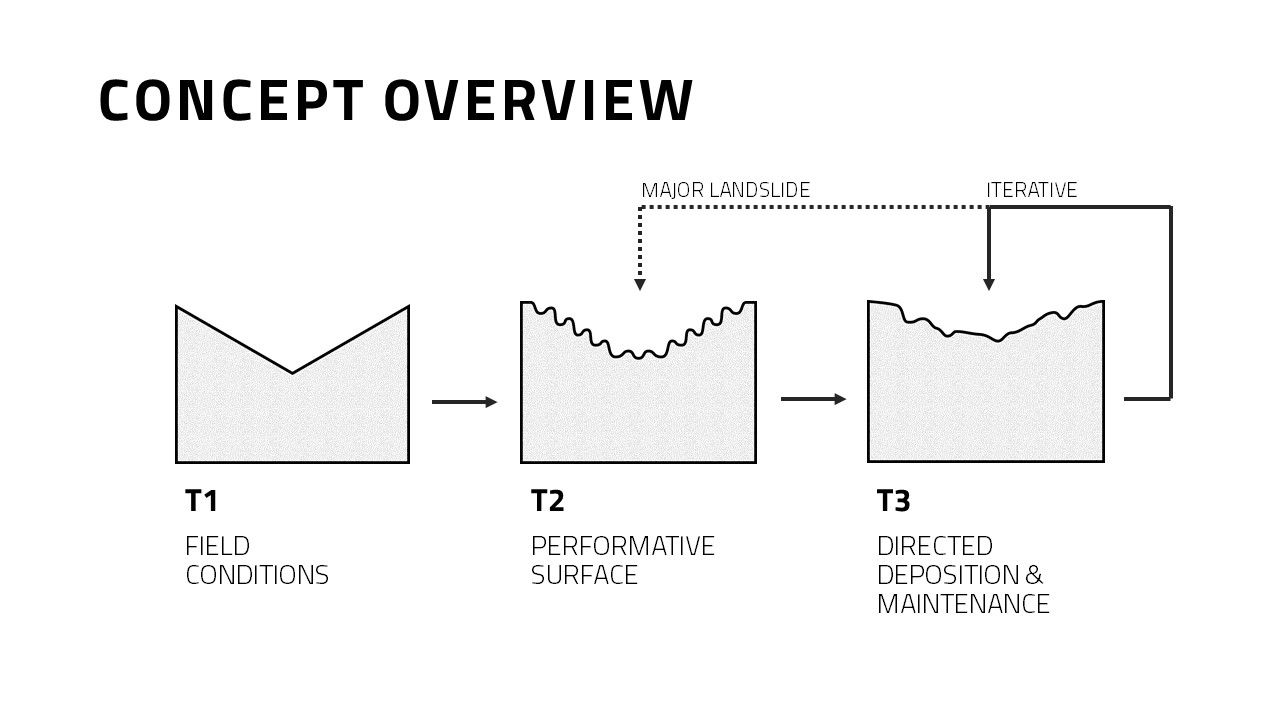
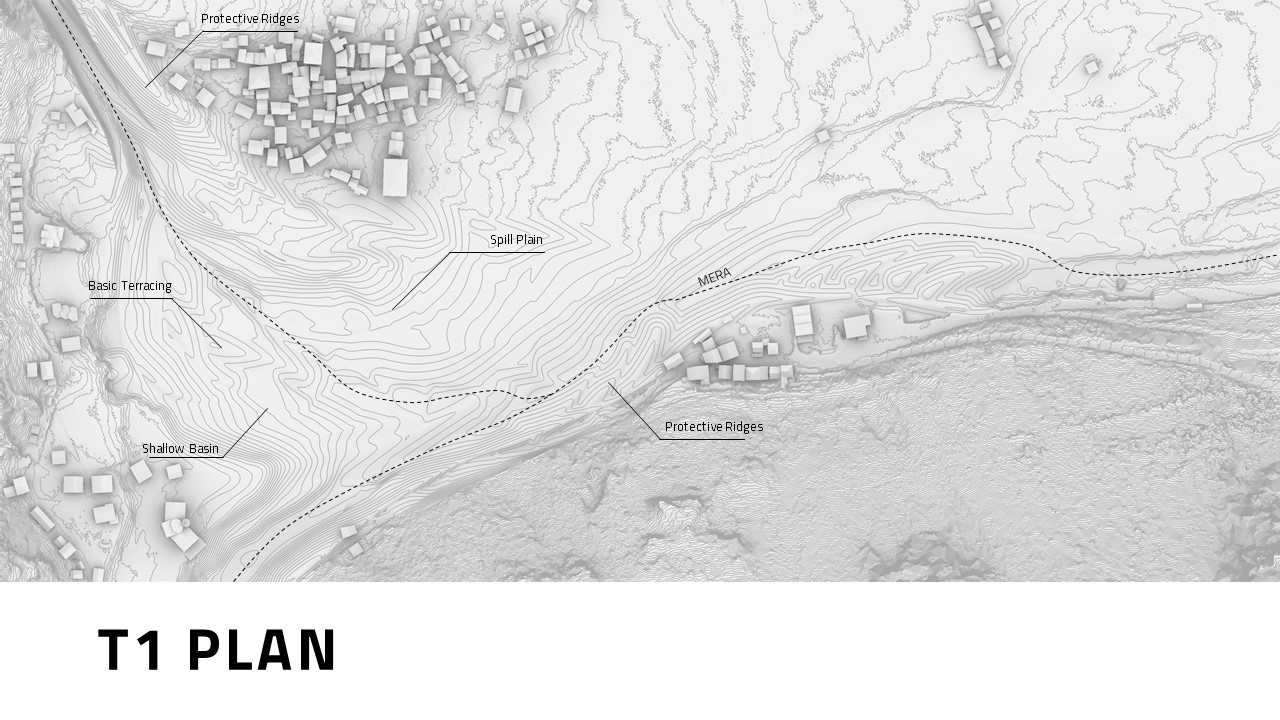
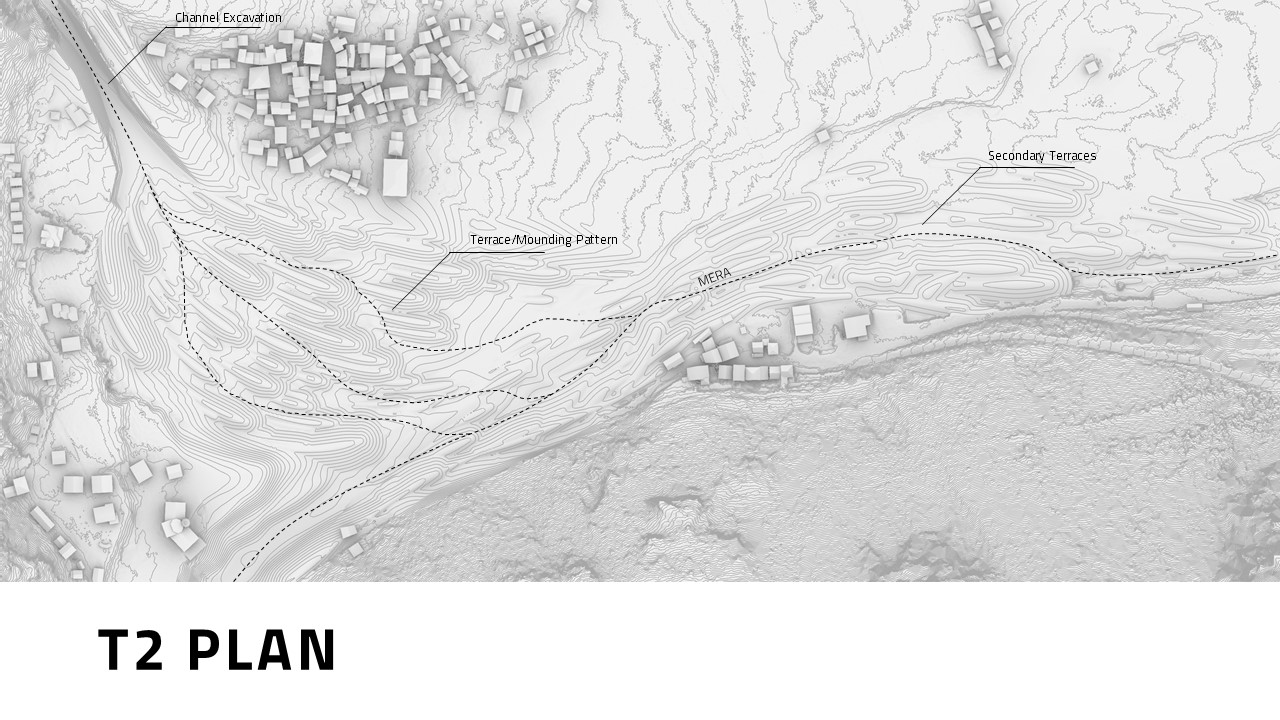
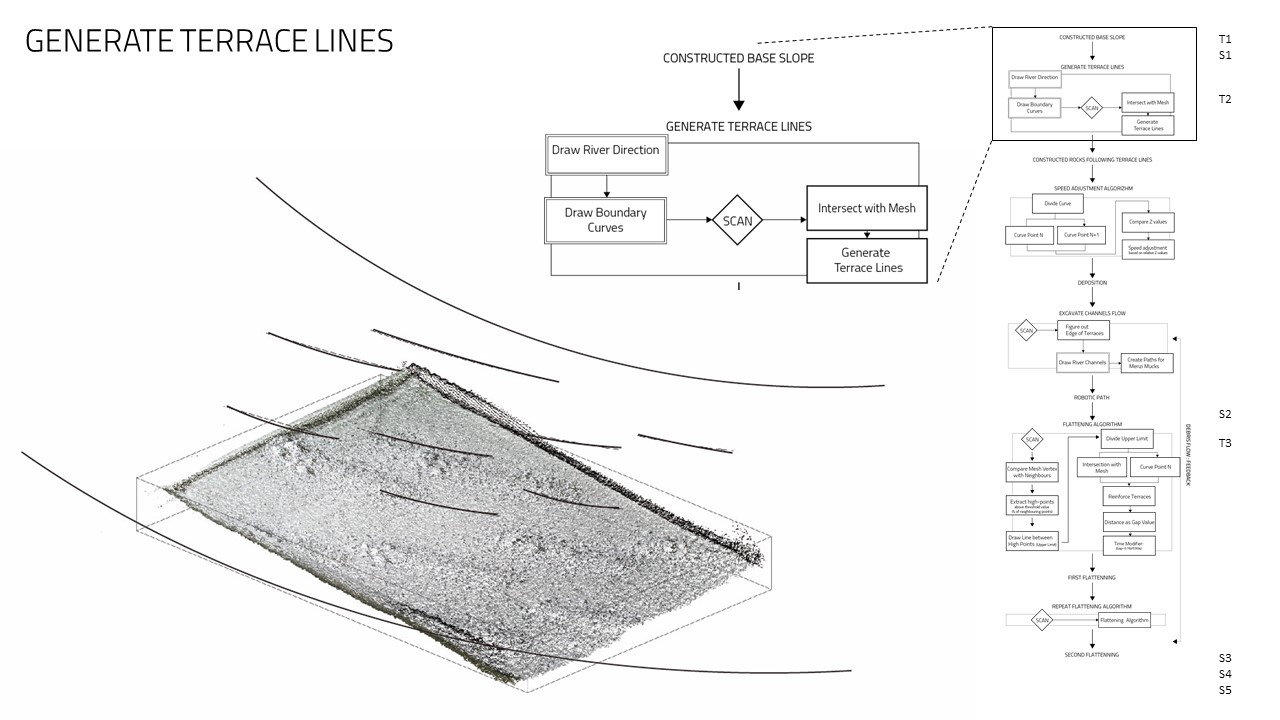
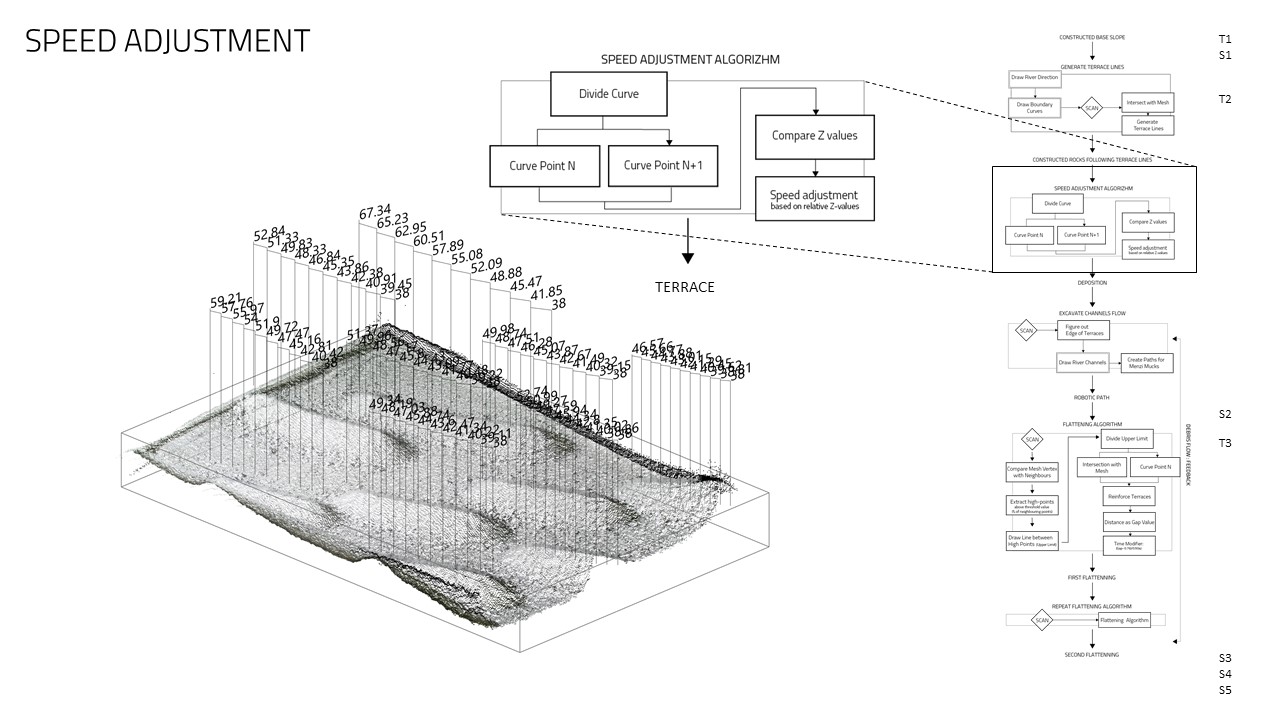
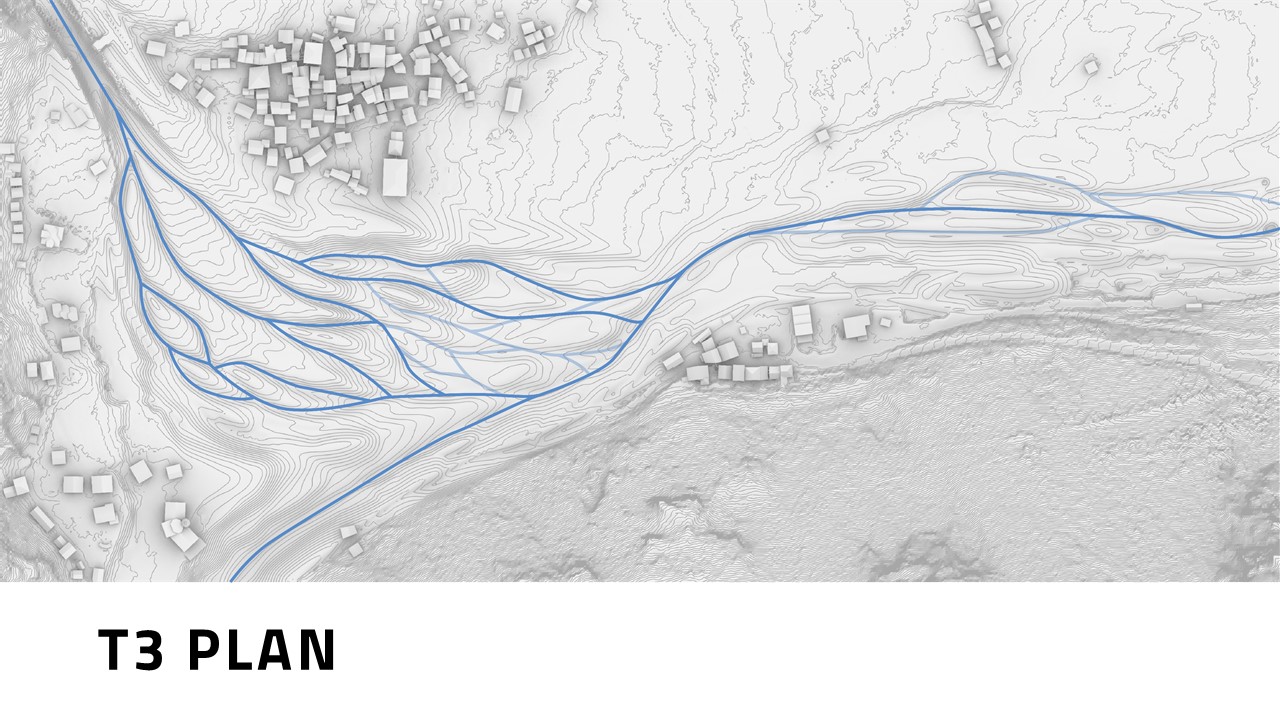
During the Design Studio every group studied the three strategic design phases (2015 – 2019 – future) in order to respond to the many debris flows arriving in Bondo. Starting from the original valley state in 2015 (T1), the topography in Bondo has been prepared to allow for the 400’000 m3 of material arriving in summer 2017. After this first landslide, clean-up activities of the riverbed and the construction of a promenade and belvedere was designed (T2). At the same time, strategic topographic structure allowed for future landslide events to happen without any destruction to houses, bridges and roads. This means that further clean-up and terrain modeling works has been planned for this last phase as well (T3). The robotic modeling in the first weeks has informed the smaller scale and the robotic construction method with experiments on the UR10 Robotic Arm. This conceptual work was translated to a thesis on robotic construction for the new landscape topology on the site.


Extracts from the Final Presentation and Process Portfolio of Lip Jiang Lee, Matthew Lee and Yorika Sunada:
“In our final project, we have implemented the garage, the menzi muck, and the site management plan as a key manner of understanding our project. Many reiterations of the design and cycles of research have been done, and we believe that the project is a clear visualisation of the harmony that can be created between natural and robotic processes. The movements of the robots, perpetually changing and perpetually enacted upon the landscape like an electronic SIsyphus, is frozen in our plan for T3. Ultimately, the project is about a process, understanding nature‘s programming code and attempting to „hack“ it through the code of our own. This code, injected through the Menzi Mucks, aim to shape the debris flow in our favour and to maintain the system against the entropy it creates.”
Methodological approach to the design tasks
Based on dynamic landscape modeling principles, the studio will use the facilities of the ETH Landscape Modeling and Visualizing Lab (LVML) and the ITA Arch-Tec-Lab to establish a procedural and iterative design approach. There will be workshops in robotic modeling using sand and gravel, 3D landscape modeling, and 3D prototype printing to help conceive 3D landscape models (using Rhino and Grasshopper plugins). A series of lectures, a compulsory weekend on-site visit, as well as critiques and workbooks will help students attain the high landscape design objectives set by this studio.
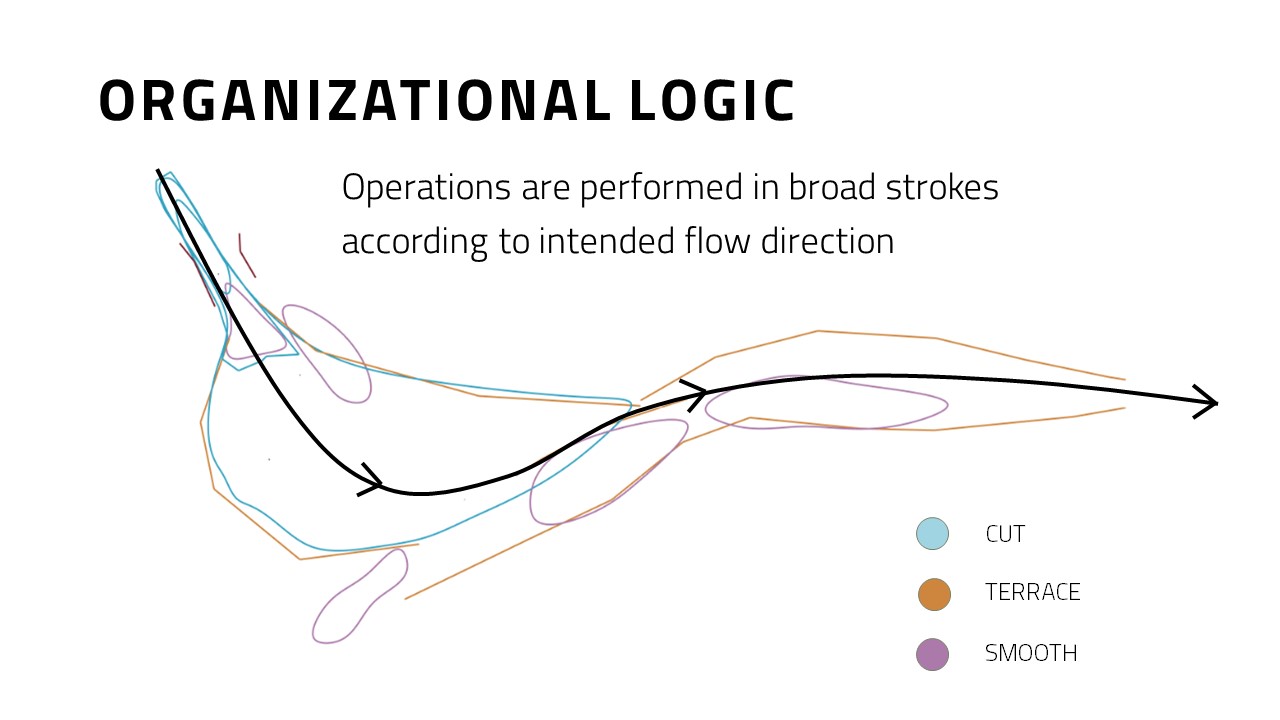
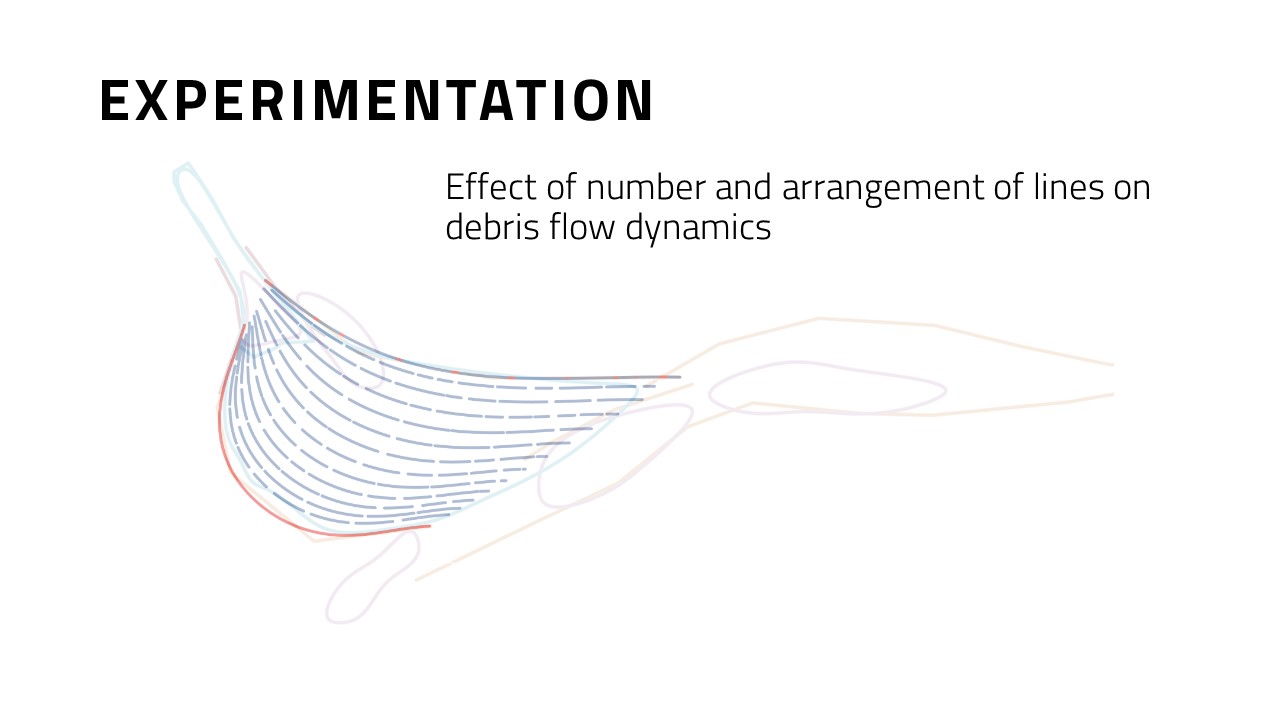
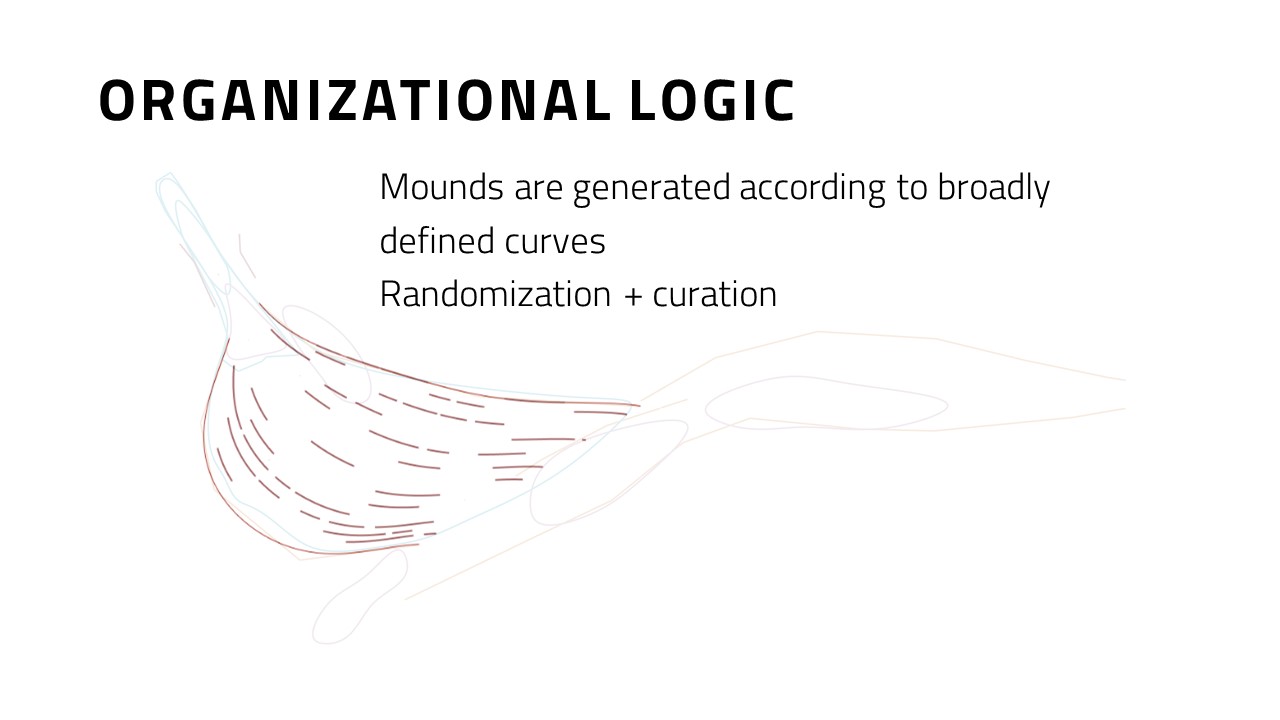
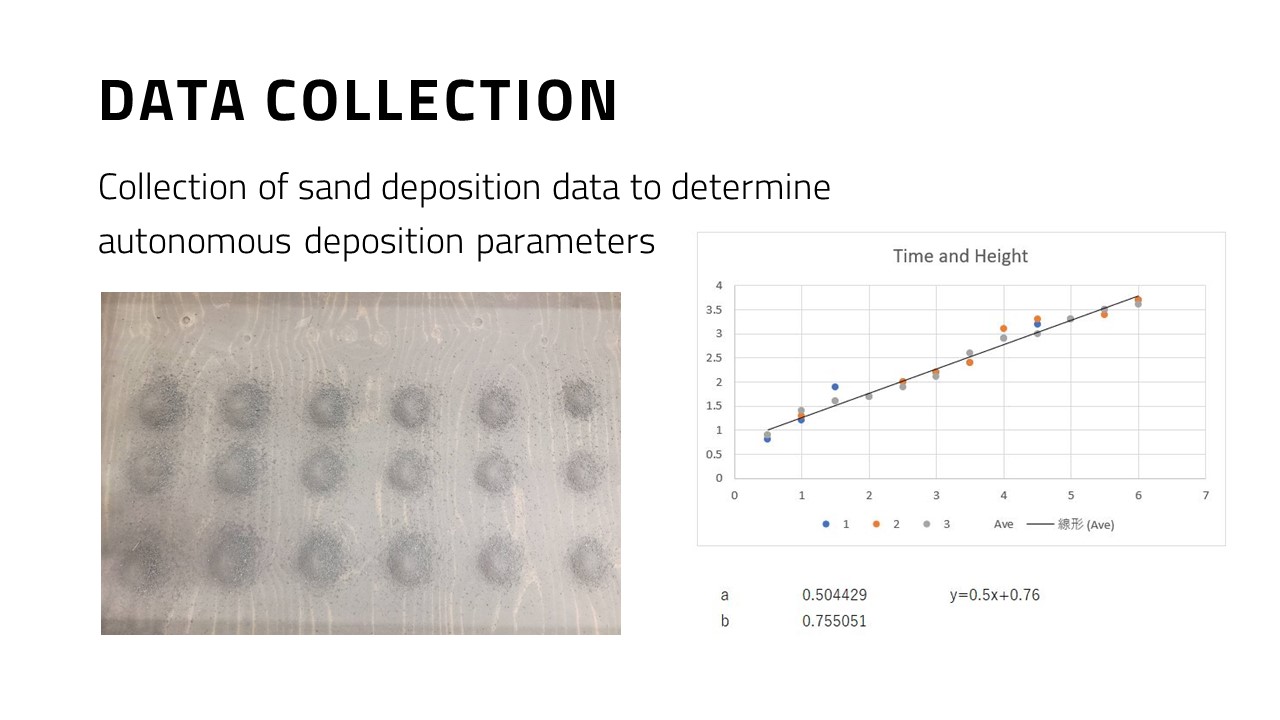
This course explores procedural design and robotic modeling processes and their potential for future landscape design. The processing of shapeless materials such as sand and gravel through digitally controlled machines equipped with sensors allowes the students to implement feedback-driven formation processes into their landscape designs. The addition of larger rocks and boulders enables them to create various surface conditions that can respond and withstand the large forces of water and debris flows. These robotic modeling processes will be simulated in model scale using a small scale robotic arm. The main objective of these investigations is not the materialization of a predefined landscape condition, but rather the precise analysis and documentation of specific material properties and aggregation processes during the simulations.

For the first time, this course explores the possibility of two-dimensional dynamics modeling of rapid mass movements in 3D alpine terrain (RAMMS) methods. The Mudslide in Bondo in 2015 was simulated by Andrea Calzolar, Sam Mettraux, and Carlo Molteni.
RAMMS simulations by Rongsheng Chen, Sebastian Meier and Ayako Yamagishi during the design process.

RAMMS simulations by Roma Guildimann and Jonas Haldemann of their Final Project “ROBOTS AGAINST BOUNDARIES” for T1, T2 & T3.
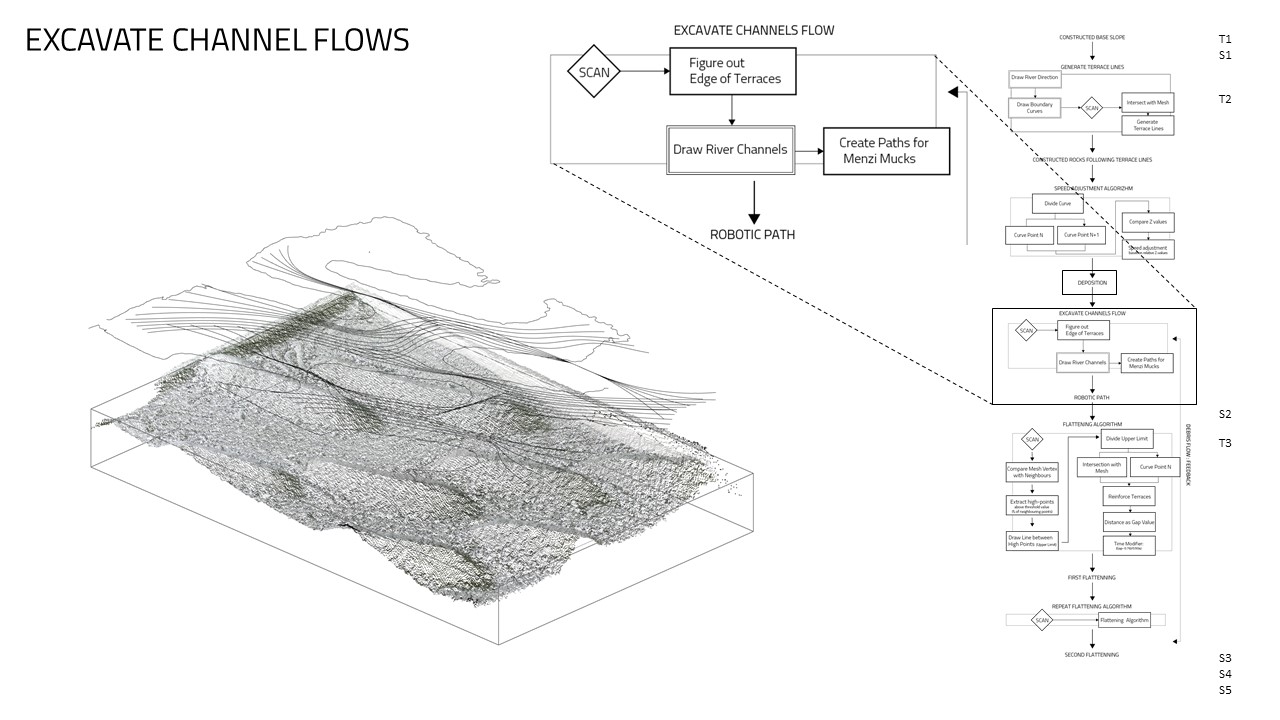
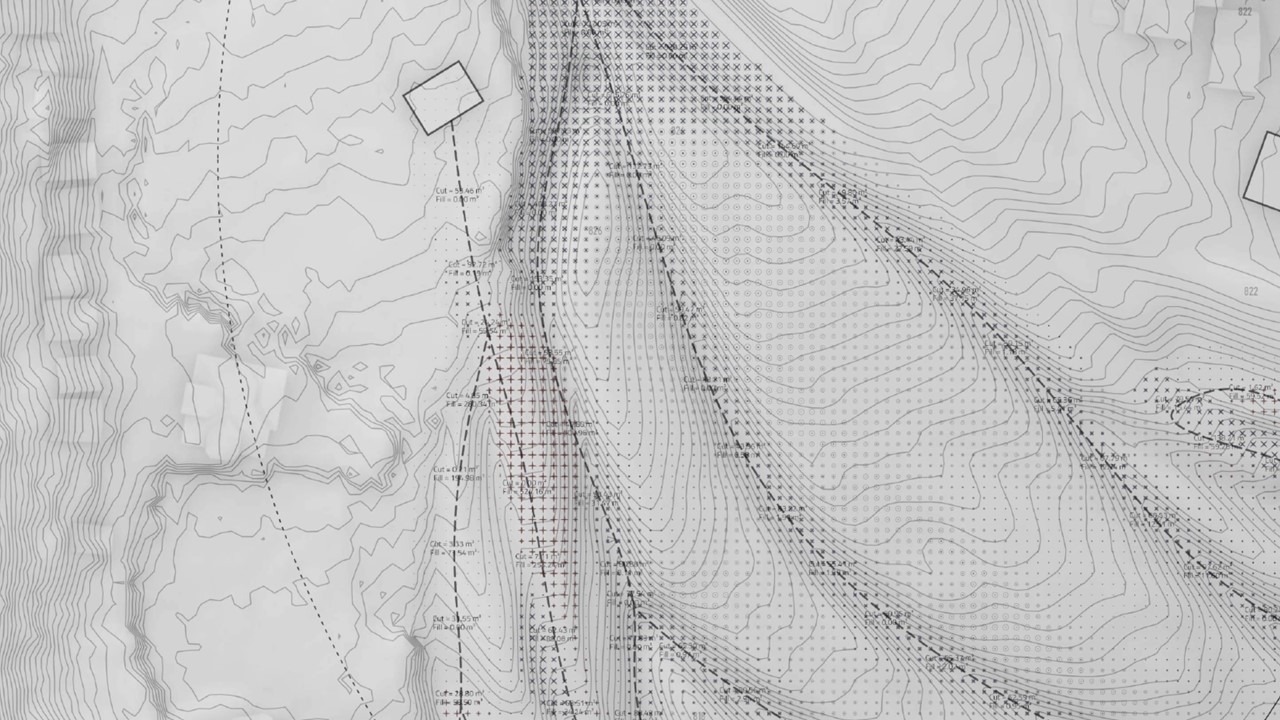
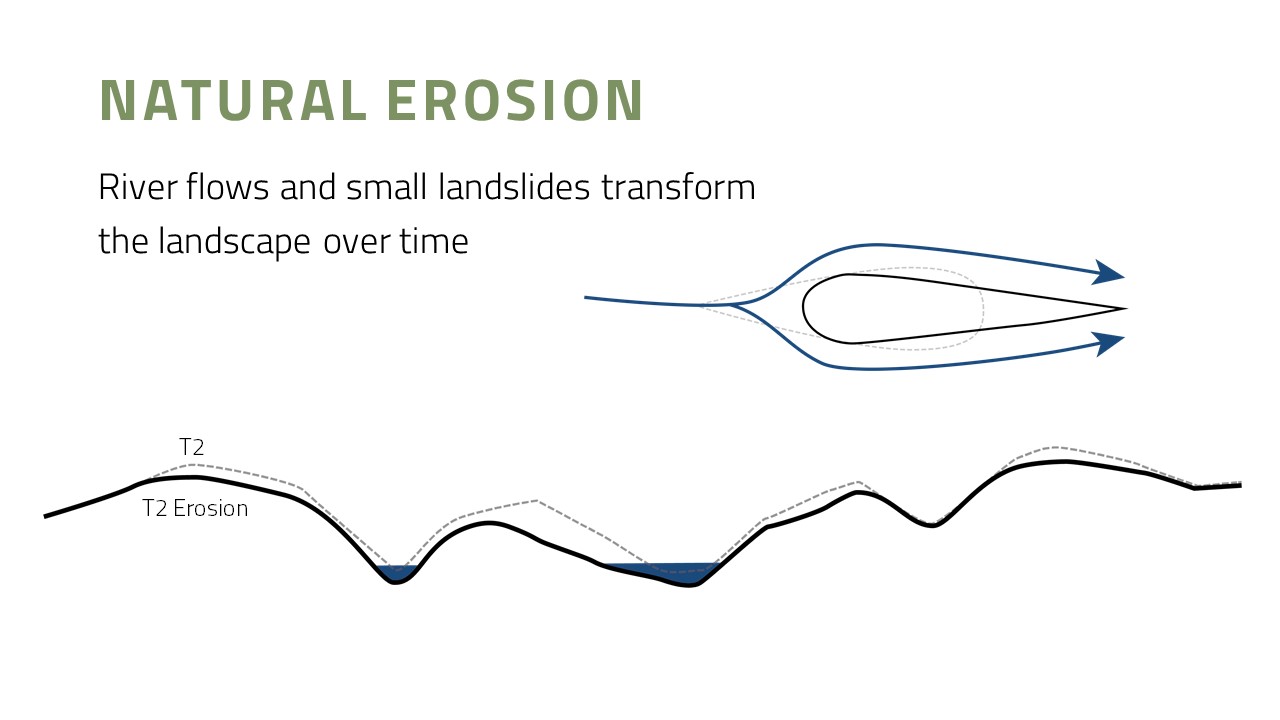
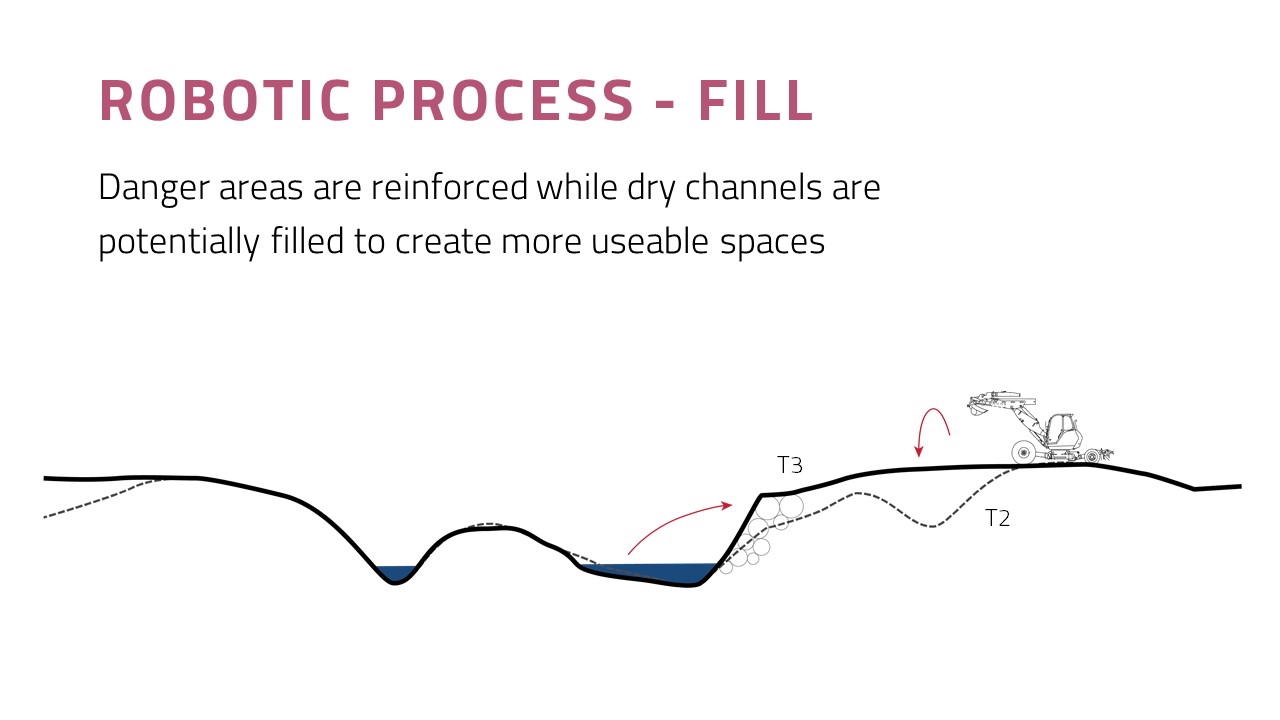
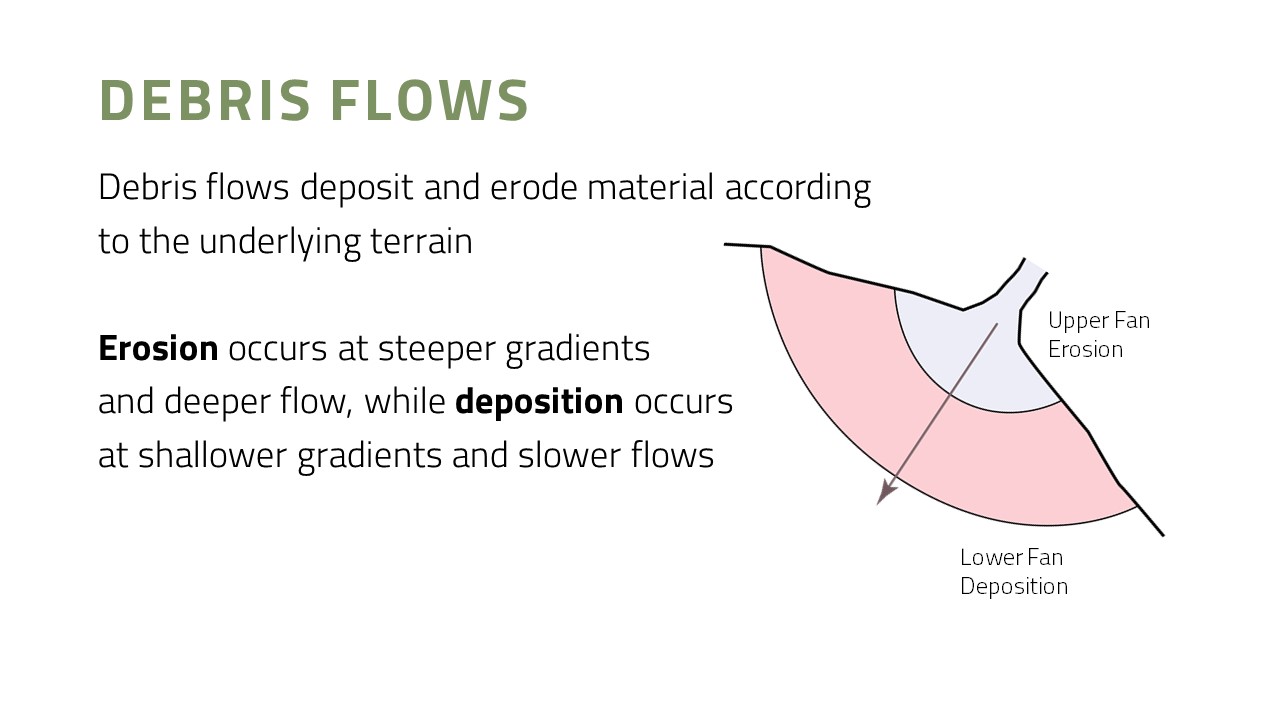
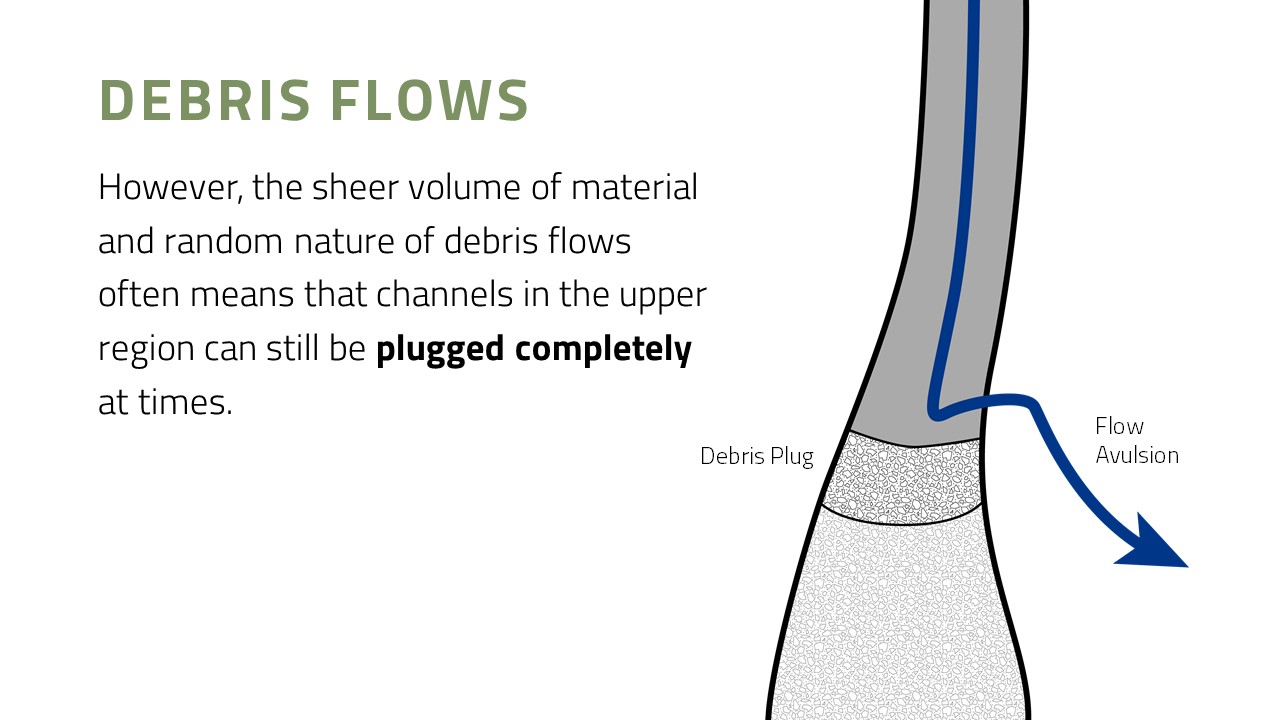
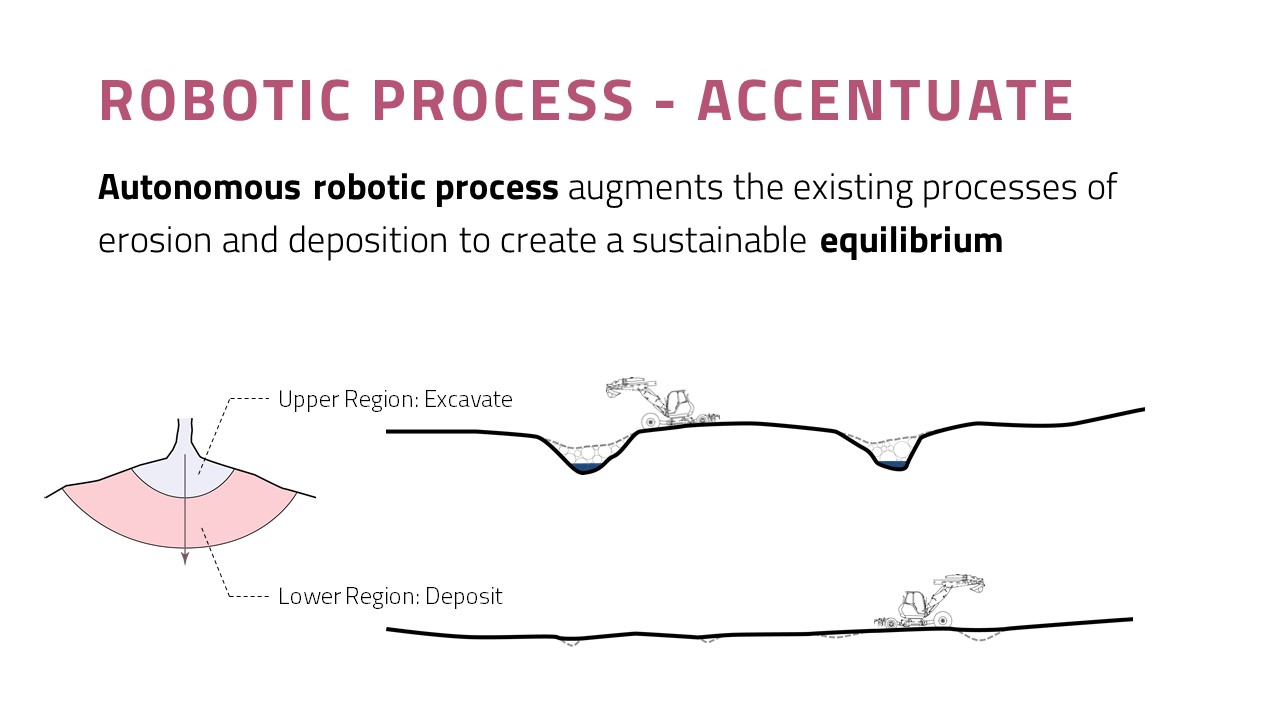
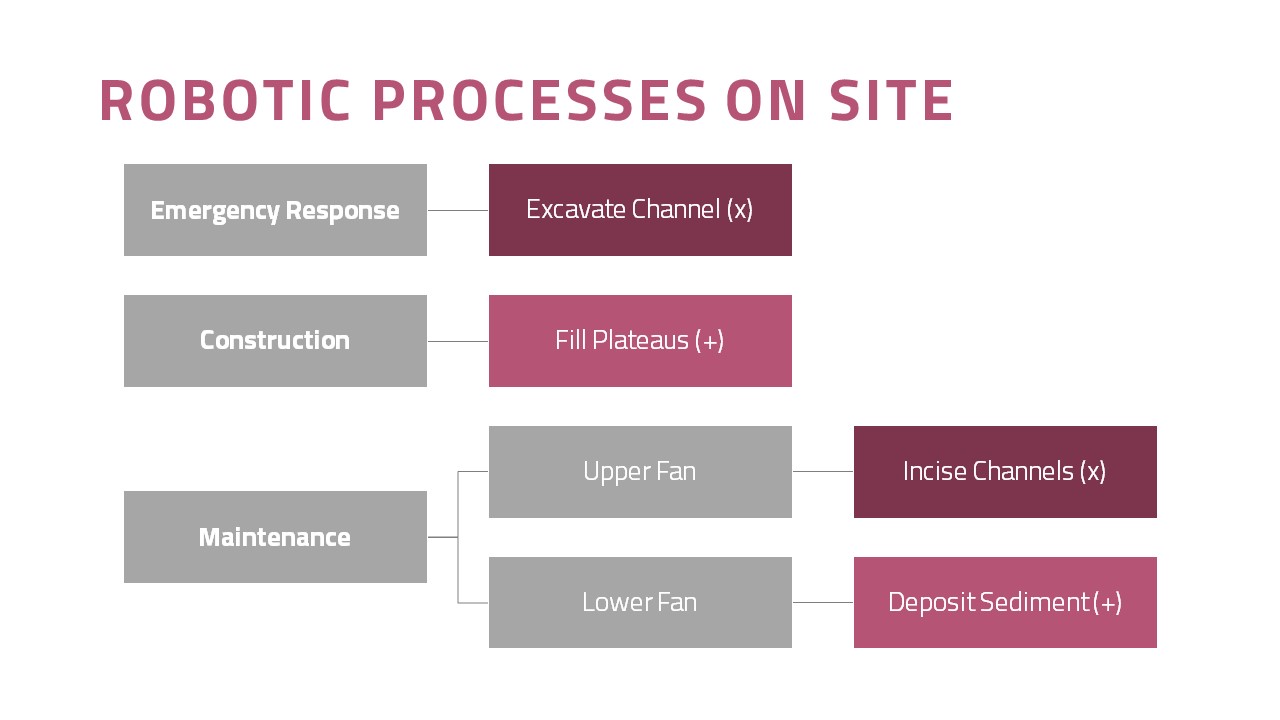
Robotic Process by student Elizabeth Levy and Stanislaw Modrzyk.
Final student projects, an overview.
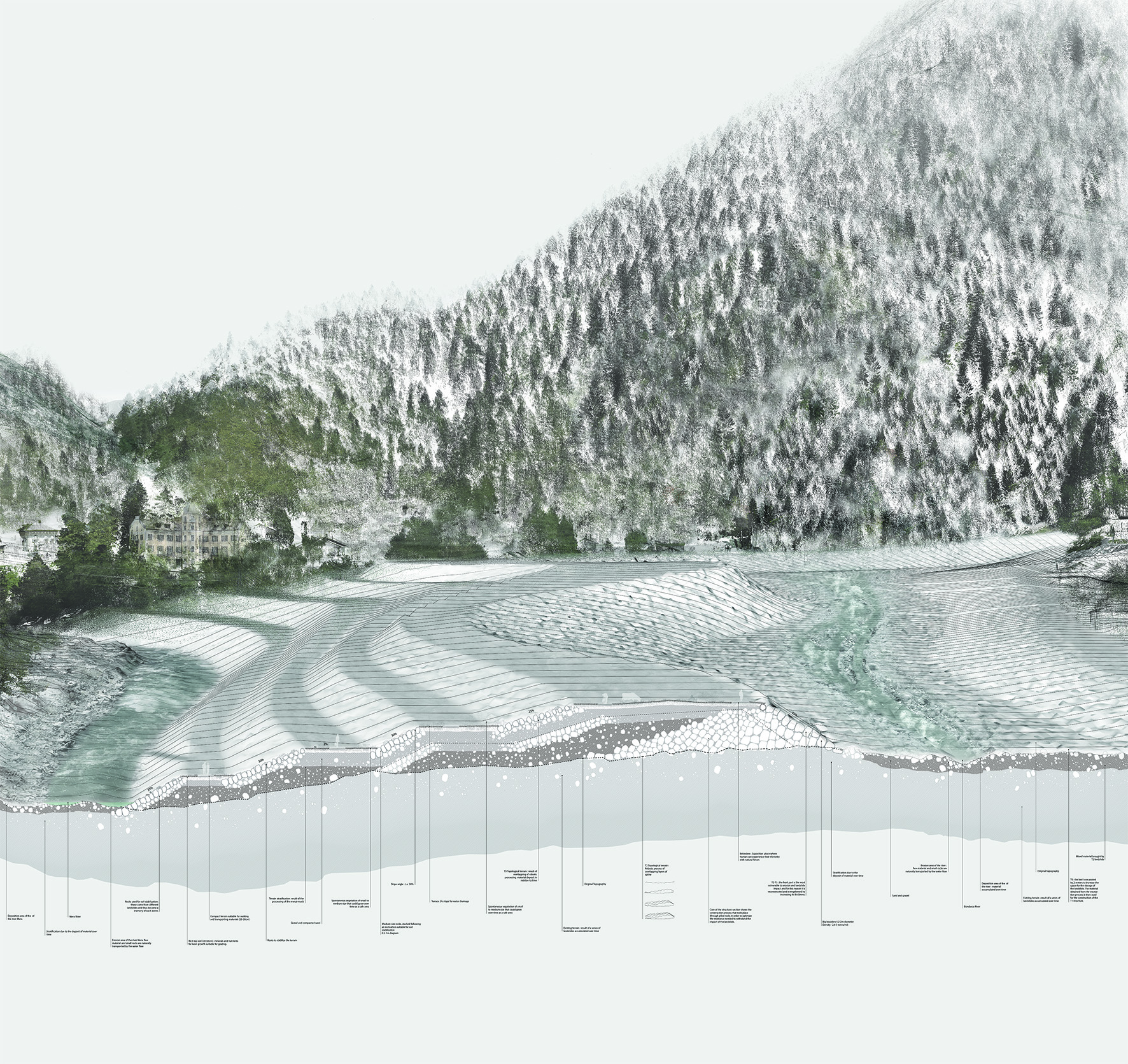
Section through Bondo by the students Andrea Colzolar, Sam Mettraux and Carlo Molteni.

Final exhibition of the students’ projects.

Student Basil Schück working at on his Robotic Process. Photo by Jesús Medina | 2018



Student Andrea Calzolar presenting the Project “ALTER EGO” at the Final Critique.
This is a boxed content block. Click the edit button to edit this text.
{kind=link}