

STUDIO
This studio was a collaboration between the Chair of Christophe Girot and Gramazio Kohler Research.
GUEST LECTURERS
Prof. Dr. Kurt Heutschi, EMPA
EXPERTS:
Prof. Dr. Marco Hutter | Institute of Robotics and Intelligent Systems | ETH Zürich; Dominic Jud | Robotic System Lab | PhD Researcher | ETH Zürich
Assistants
Ilmar Hurkxkens, Fujan Fahmi, Dr. Ammar Mirjan
STUDENTS
David Abraham, Philippe Airoldi, Alessandro Canonica, Michele Capelli, Maximilien Durel, Kenichiro Endo, Nina Feix, Gabriel Fiette, Milan Jarrell, Dominik Keller, Shohei Kunisawa, Marius Oneta, Ladina Ramming, Anna Rickli, Thorben Westerhuys, Nicolas Wild, Bing Yang
ROBOTIC LANDSCAPES II
Results – Design Studio HS2018
DISSERTATION
The thesis is part of the interdisciplinary research project ‘Construction Robotics’ supported by the NCCR Digital Fabrication. It is a collaboration between the Chair of Landscape Architecture of Prof. Christophe Girot, The Chair of Architecture and Digital Fabrication of Gramazio and Kohler and the Robotic System Lab of Prof. Marco Hutter at the ETH Zurich. | The Topology of Robotic Landscape Fabrication
CONTACT
A New Topology for Valle Riviera
The HS 2017 Robotic Landscapes Design Studio is a collaboration between the Chair of Christophe Girot and the Gramazio Kohler Research. It will explore the robotic manipulation of local topography to create a new linear landscape park and sound barrier along the A2 in the lower Valle Riviera, Ticino. Innovative topological modelling methods will be used to study the shaping of formless soil material with robotic fabrication processes.
The goal of the studio is to define a new landscape topology with regard to acoustic performance through robotic fabrication. Students are asked to develop tangible and precise landscape structures at various stages, phases, and scales over time.




Field Trip, Final Critic and Sand Modelling ‘Robotic Landscape’ – 2017
Robotic – 2017

Student Work: Ladina Ramming, Thorben Westerhuys
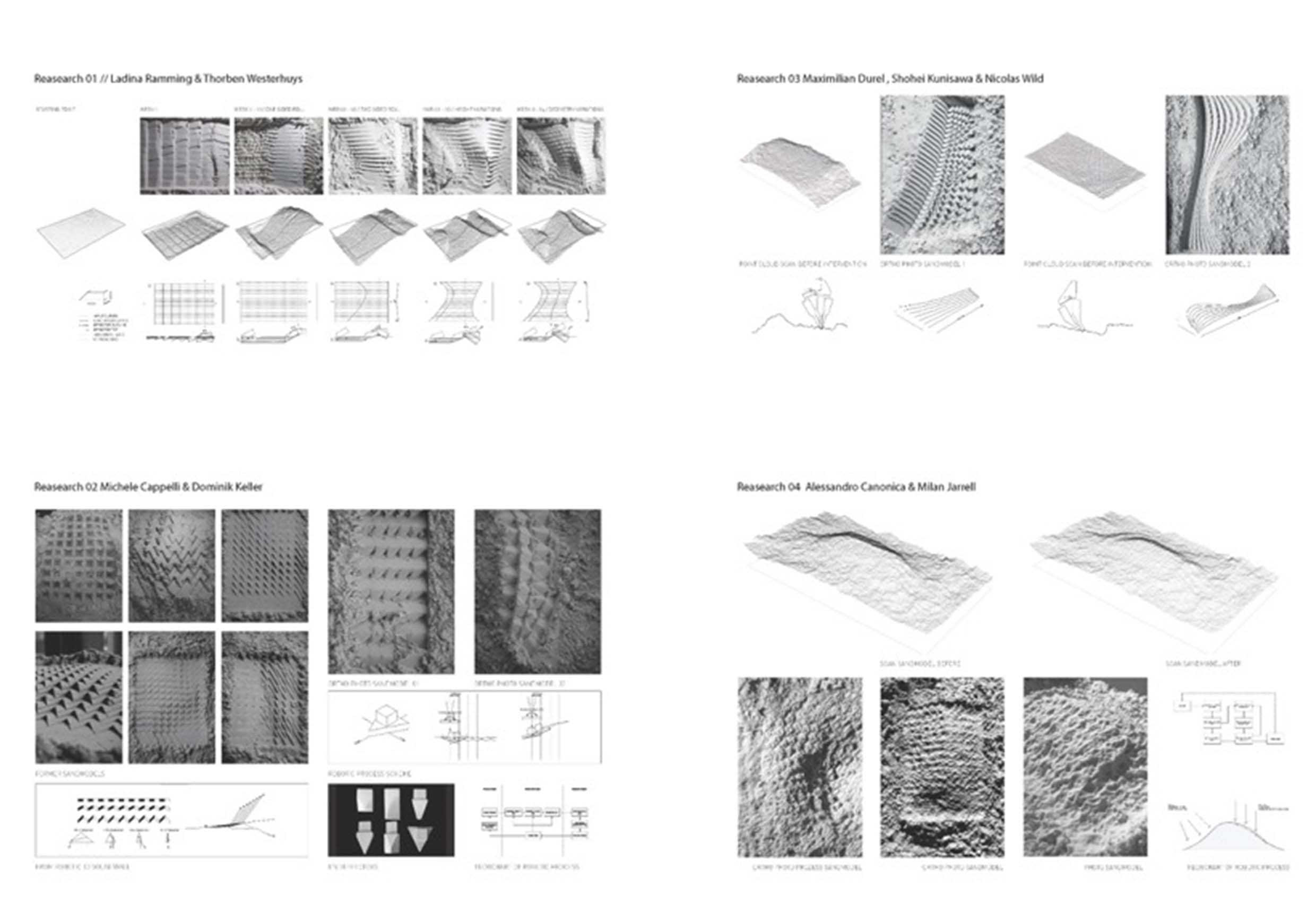
Student Research in Robotic Sand Modeling
{kind=link}