

STUDIO
The HS 2019 Robotic Landscapes III studio was the third collaboration between the Chair of Christophe Girot and the Chair of Gramazio Kohler Research.
EXPERTS
Prof. Dr. Marco Hutter | Institute of Robotics and Intelligent Systems, ETH Zürich; Dr. Brian McArdell | Scientific Staff Member, Swiss Federal Institute for Forest, Snow and Landscape Research WSL; Prof. Peter Molnar | TP at the Chair of Hydrology and Water Resources Management, ETH Zurich; Matthias Bernhard | Digital Building Technologies, ETH Zürich; Dr. Ammar Mirjan | Gramazio Kohler Research | Chair of Architecture and Digital Fabrication; ETH Zürich; Dominic Jud | Robotic System Lab | PhD Researcher, ETH Zürich; Fiona Maager| Laboratory of Hydraulics, Hydrology and Glaciology | PhD Researcher, ETH Zürich
ASSISTANTS
Ilmar Hurkxkens, Fujan Fahmi, Benedikt Kowalewski, Jesús Medina
STUDENTS
Leon Beck, David Brückmann, Tobias Etter, Mevion Famos, Claudia Fleischmann, Nicola Graf, Leo Graf, Luana Günthardt, Mathias Häcki, Hannah Kilian, Severin Kurt, Vanessa Magloire, Yuki Minami, Sakiko Noda, Joelle Schmied, Zehra Ter, Wei Wei Toh, Caspar Trueb, Lorin Wiedemeier, Yueye Xu, Matteo Zwyssig.
DISSERTATION
The thesis is part of the interdisciplinary research project ‘Construction Robotics’ supported by the NCCR Digital Fabrication. It is a collaboration between the Chair of Landscape Architecture of Prof. Christophe Girot, The Chair of Architecture and Digital Fabrication of Gramazio and Kohler and the Robotic System Lab of Prof. Marco Hutter at the ETH Zurich. | The Topology of Robotic Landscape Fabrication.
ROBOTIC LANDSCAPES I
Results – Design Studio HS2017
ROBOTIC LANDSCAPES II
Results – Design Studio HS2018
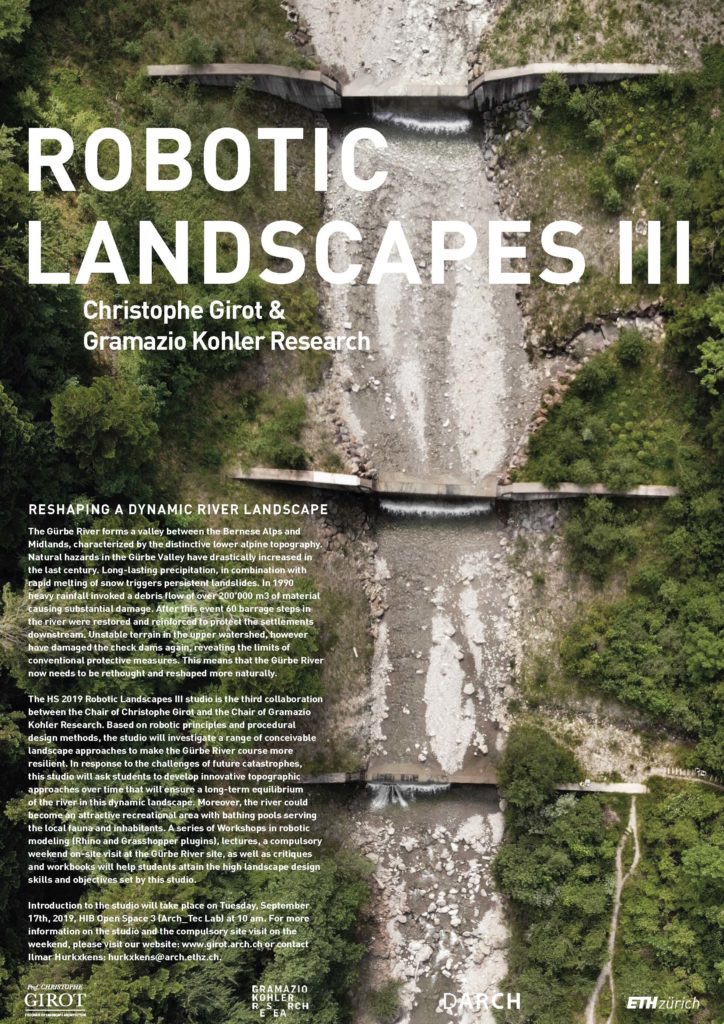
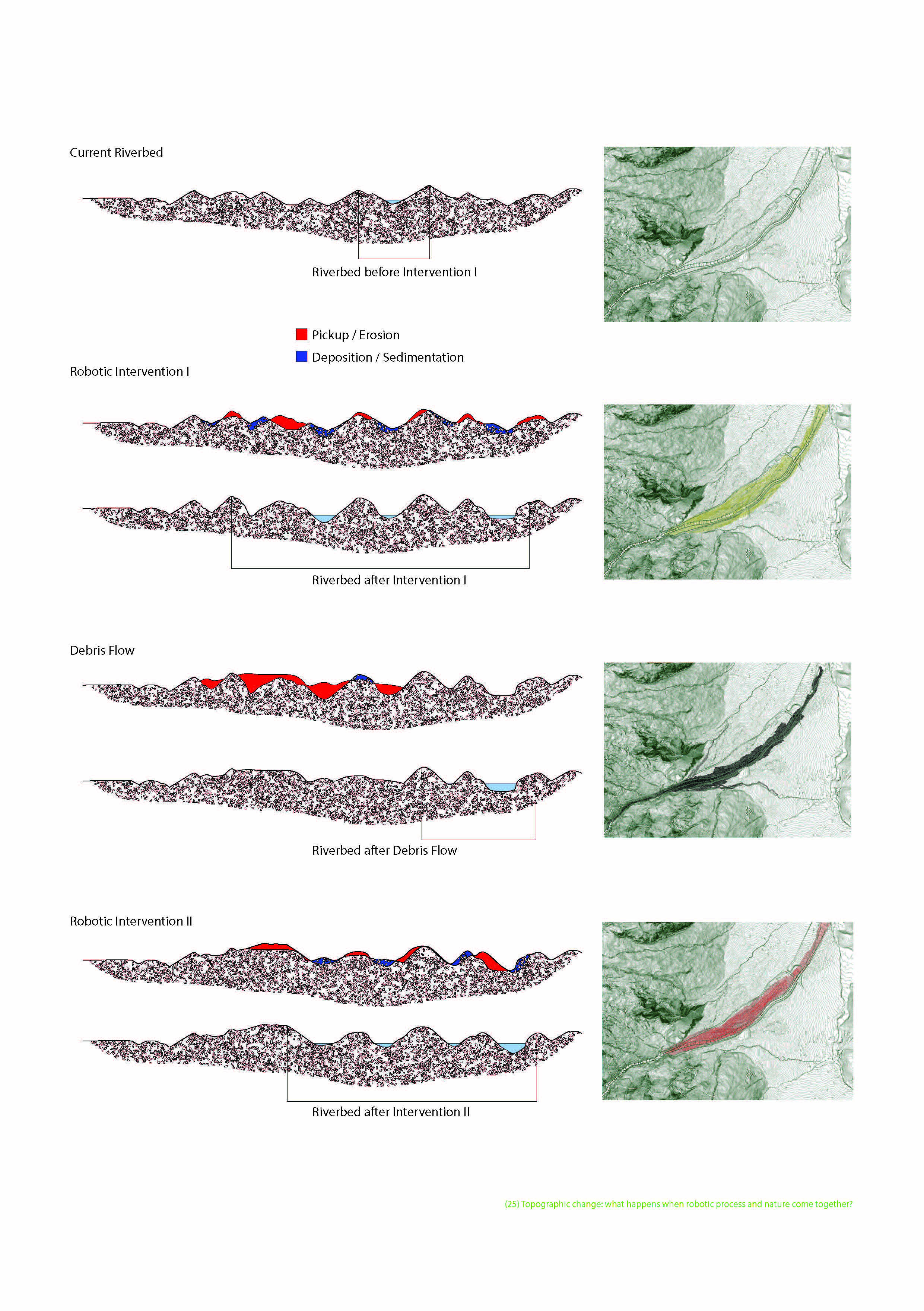
Reshaping a Dynamic River Landscape
The Gürbe River forms a valley between the Bernese Alps and Midlands, characterized by the distinctive lower alpine topography. The 30 km of the Aare tributary has challenging natural conditions and therefore an exceptionally tumultuous construction history. In the 18th century, the river appeared entirely different. The Great Gürbe Correction at that time enabled settlement and economic development in the “lower stream.” Despite the channeling of the Gürbe and the construction of 160 dams, flood damages could not be avoided and still today hydraulic protection projects are carried out without success. Furthermore, natural hazards in the Gürbe Valley have drastically increased in the last century. Long-lasting precipitation, in combination with the rapid melting of snow, triggers persistent landslides.
In 1990 heavy rainfall invoked a debris flow of over 200’000 m3 of material causing substantial damaged in the surrounding villages and destroying a significant part of the creek structures. After this event, the residual 60 barrage steps in the river were restored and reinforced to protect the settlement areas. Looking carefully at the chronic disasters of the last centuries, it can be observed that the number of disruptions caused by natural phenomena will increase dramatically.
Recently, the unstable terrain in the upper watershed damaged the check dams again, revealing the limits of conventional protective measures on the seemingly uncontainable Gürbe River.
Drone Video, June 2019, Benedikt Kowalewski – Chair Girot


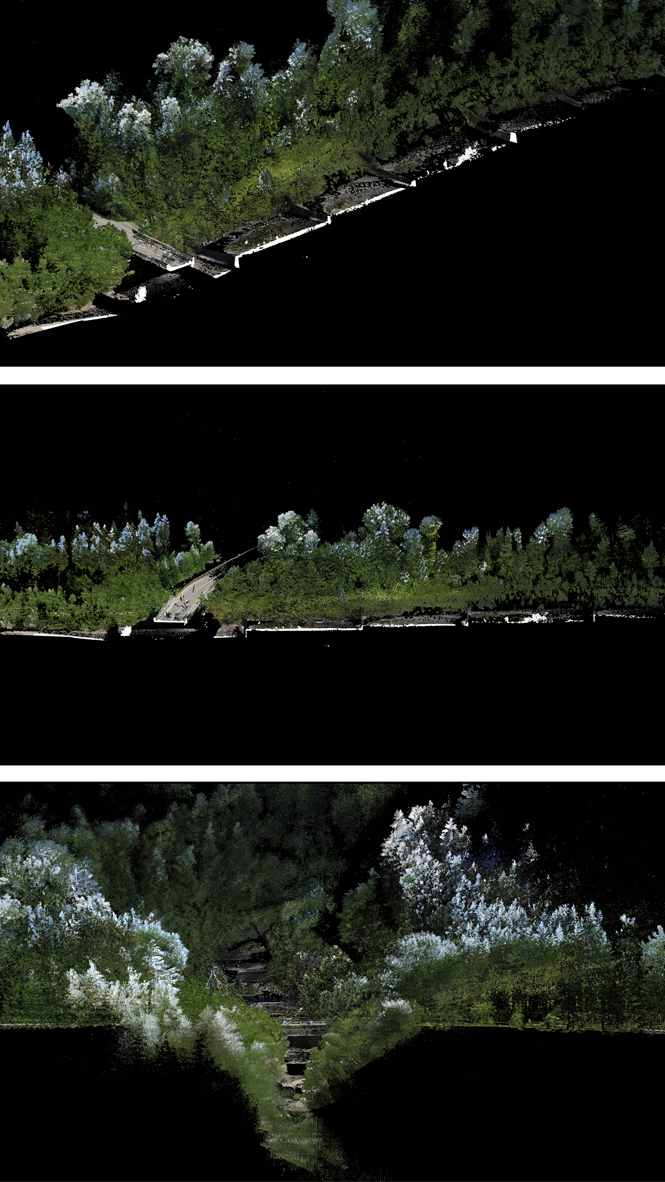
Point Cloud Model of the Gürbe Valley, Chair Girot
Robotic processes and topographic prototypes
The HS 2019 Robotic Landscapes III studio was the third collaboration between the Chair of Christophe Girot and the Chair of Gramazio Kohler Research. Based on robotic principles and procedural design methods, the studio investigated a range of conceivable landscape approaches to make the Gürbe River course more resilient. In response to the challenges of future catastrophes, this studio asked students to develop, over time, innovative topographic approaches that will ensure a long-term equilibrium of the river in this dynamic landscape. Besides, it continued to explore the potential of on-site robot construction and grading methods in landscape architecture with the application of robotic manipulations of soil and rock, as well as the reuse of the material derived from the destruction of dams.
The goal of the studio was to define how the Gürbe River can be reshaped more naturally using robotic terrain modeling methods. Students were asked to develop innovative topographic approaches over time that will ensure a long-term equilibrium of the river. As a result, the river became an attractive recreational area with bathing pools serving the local fauna and inhabitants. The design work followed the precepts of a site-specific approach with an emphasis on precise terrain modelling. There has been a conceptual approach to this studio as well as a pragmatic approach to problem-solving. The design approach took into account the amplitude and dynamics of floods in relation to terrain, topography, vegetation, and settlement. The studio methodology combined analogue design tools with digital design tools and fabrication. Workshops on soil textures, robotic fabrication, and physical landscape modeling guided the students in form-finding methods.
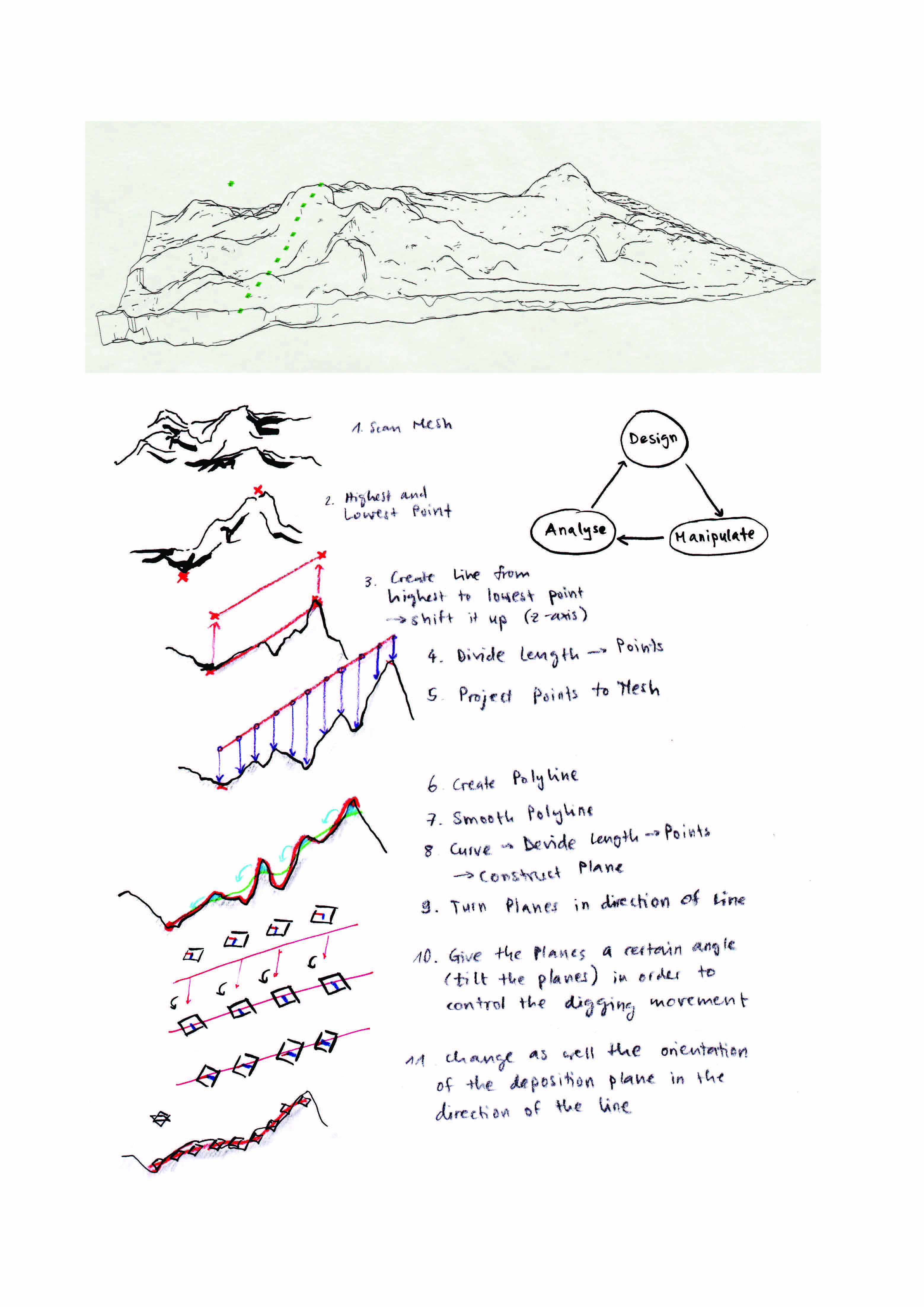
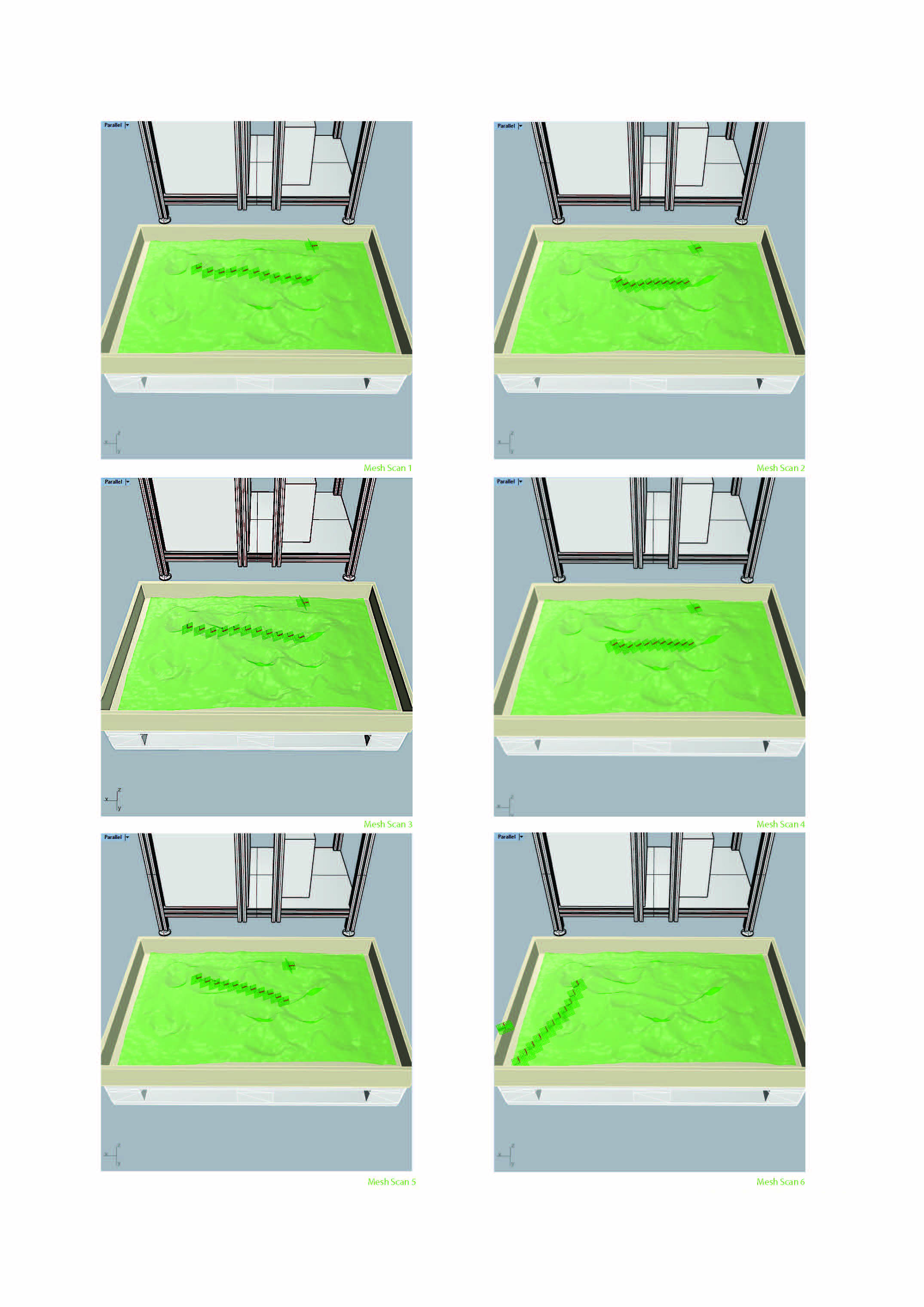
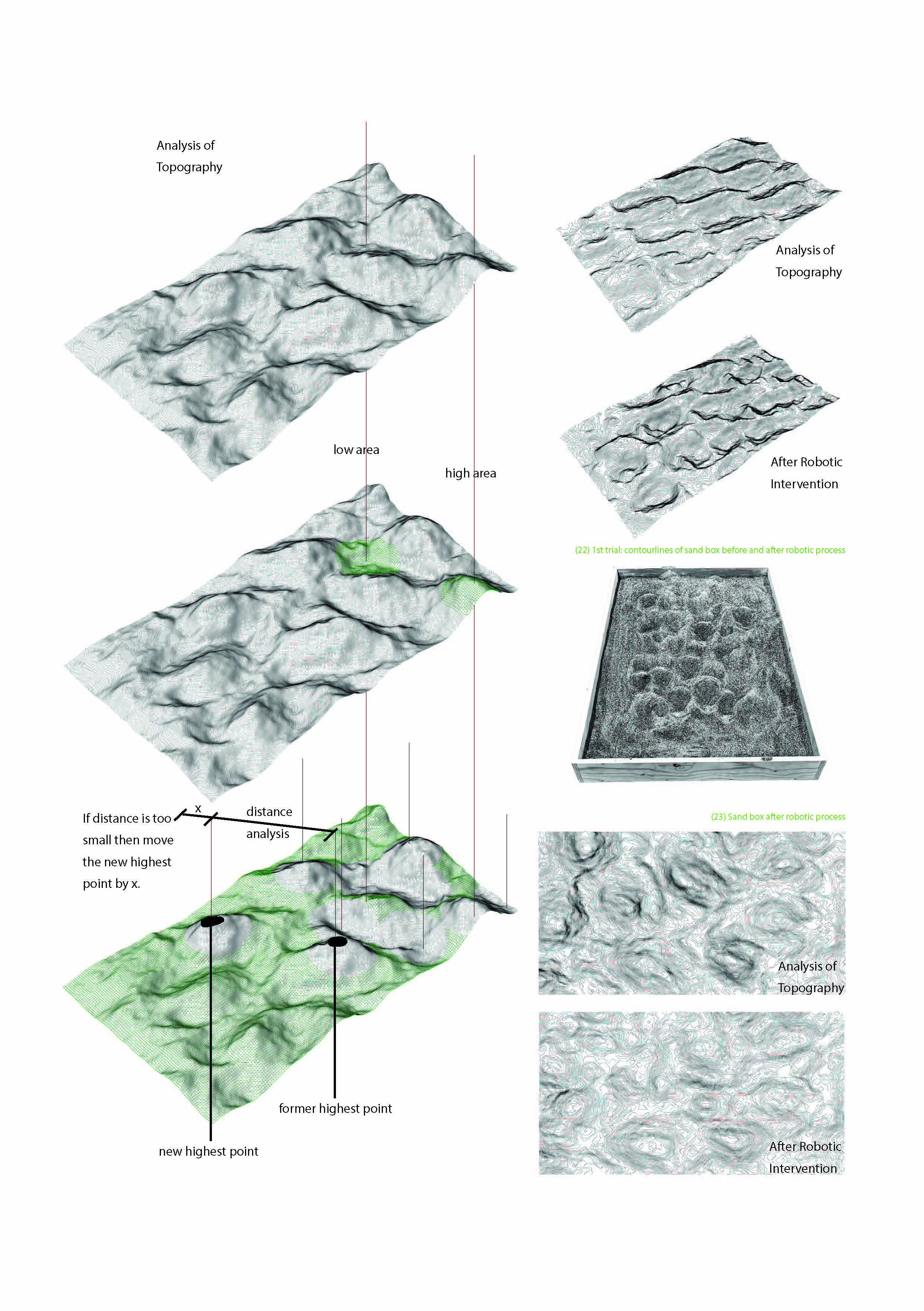
“The first and carefully discussed idea based on the fact that the shovel of the robot moves in a flowing curve from the highest to the lowest point along with the previously scanned mesh. However, the word „along“ in this context is not quite appropriate. To be more precise, we didn’t just want the robot to follow along the terrain’s surface. Still, instead, we wanted to generate a smoother curve: the shovel should always remove some sand from the top of each hill and carry it to the next lower spot on the curve and deposit it there.” Student Hannah Killian’s observations concerning her first encounter with the UR10.

Extracts from the Process Portfolio of Hannah Kilian and Leo Graf.
Robotic processes and Feedback Loop
RAMMS simulations by Caspar Trueb and Lorin Wiedemeier.
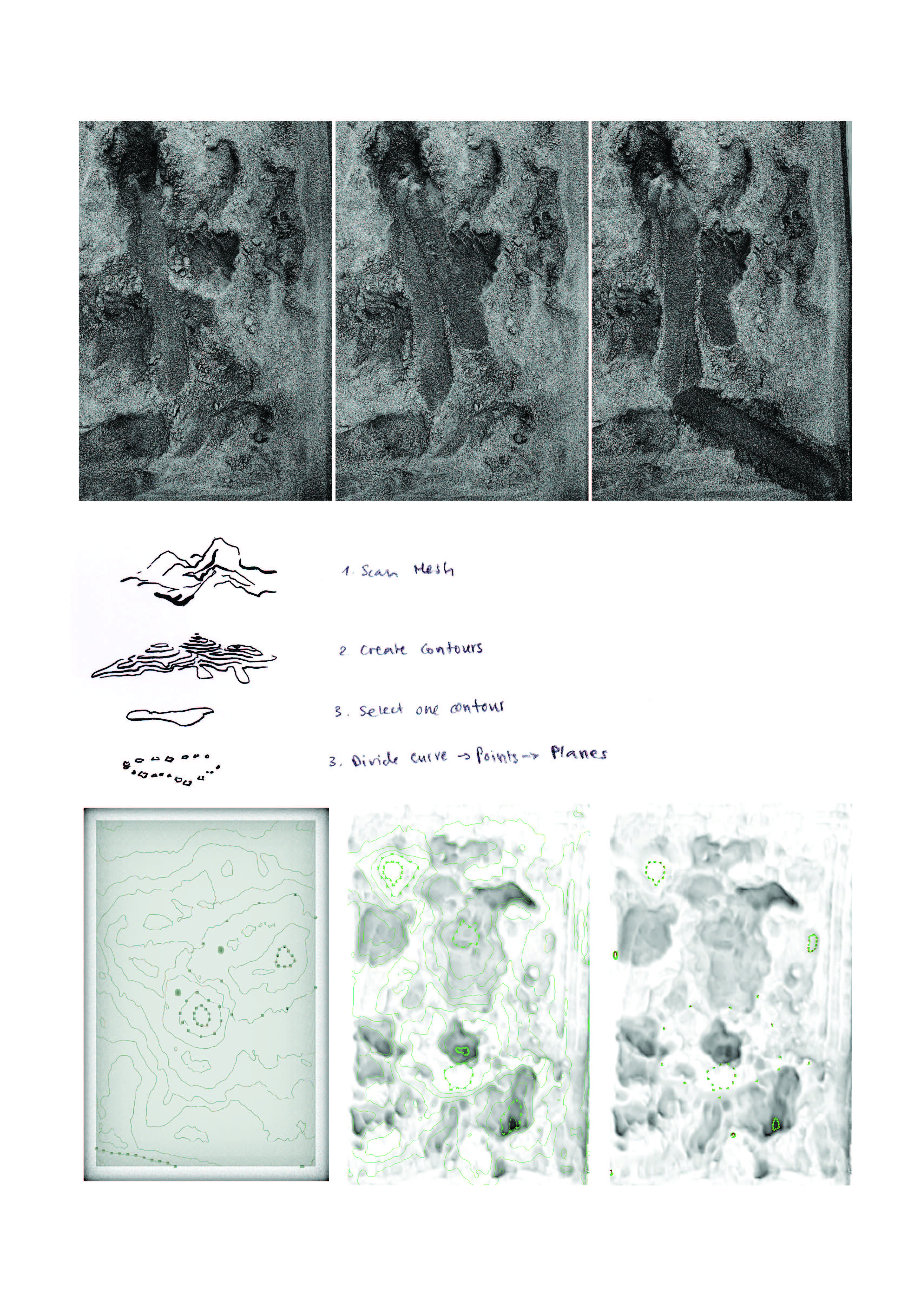
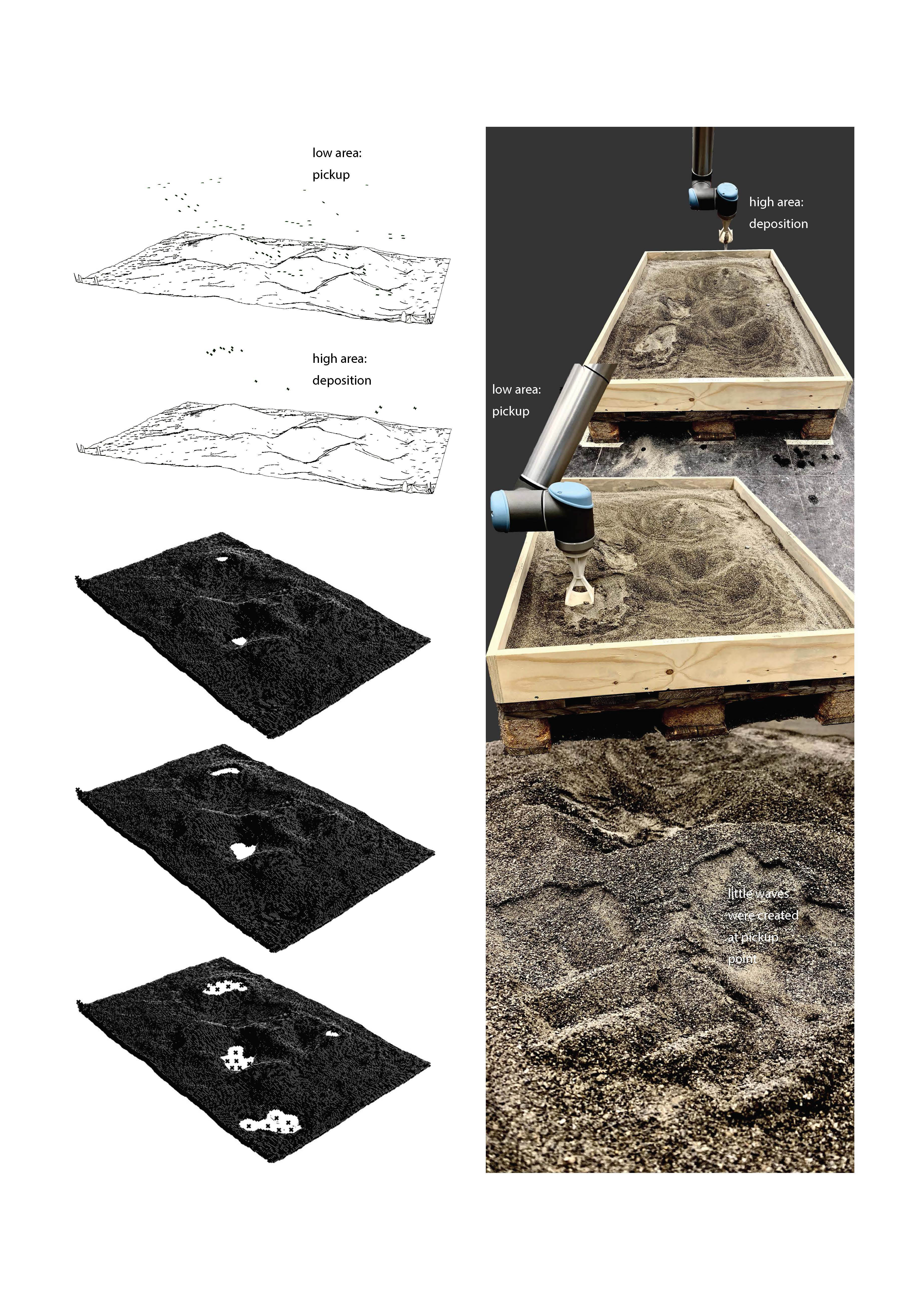
Robotic processes and Implementation
Robotic Process by student Hannah Kilian and Leo Graf.
{kind=link}